Games101-P3-4 Transformation
- P3 Preview
- Why study transformation
- 2D变换:rotation, scale, shear
- 其次坐标:增加一维表示平移变换
- 复合变换
- P4 Preview
- 3D变换
- Viewing(观测) Transformation
- View(视图)/Camera Transformation
- Projection(投影) Transformation
- Orthographic(正交)
- Perspective(透视)
P3-4 Transformation
P3
Transformation
- Modeling模型变换
- Viewing视图变换:(3D to 2D)projection
2D Transformation
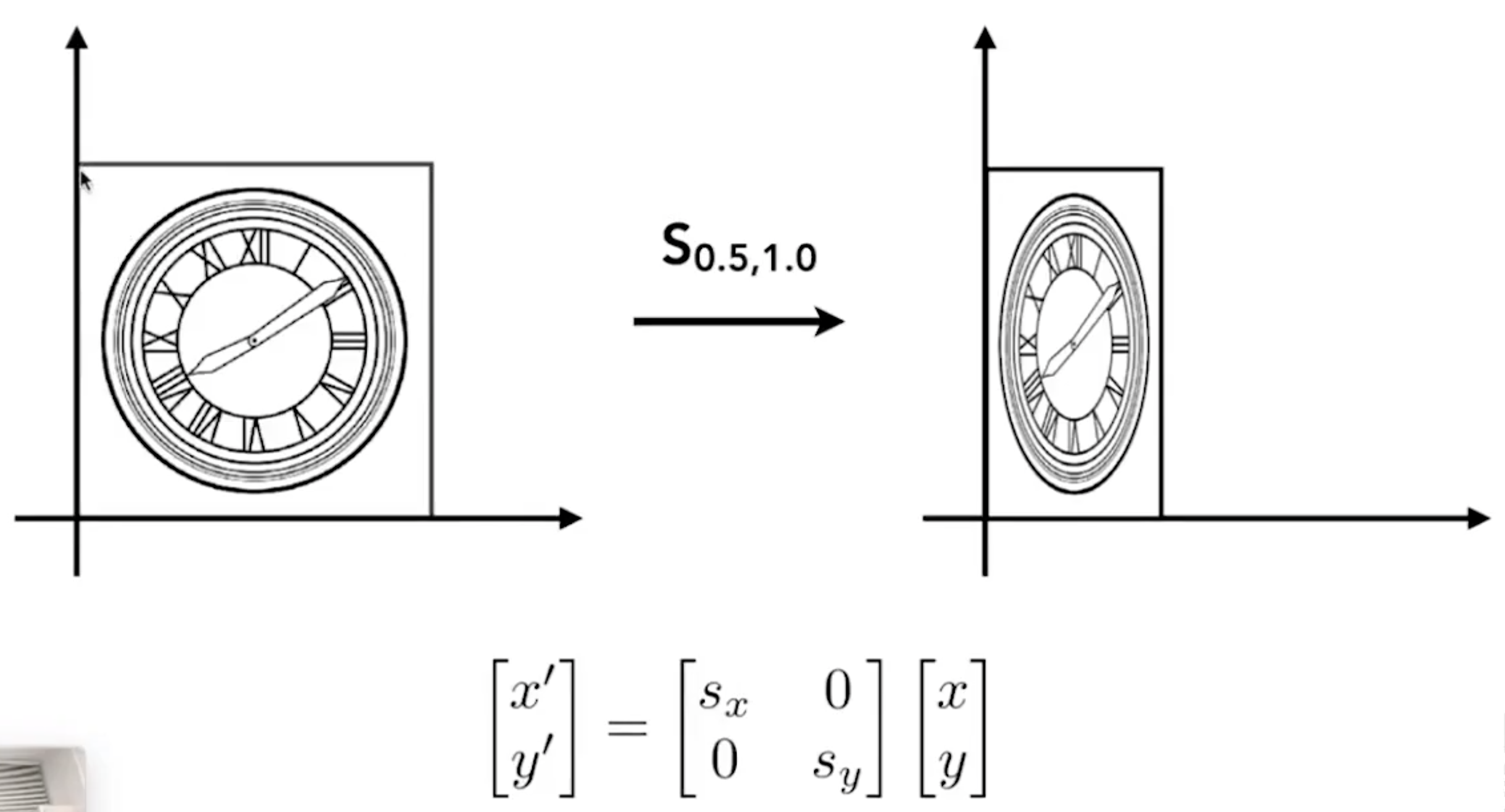
- Scale
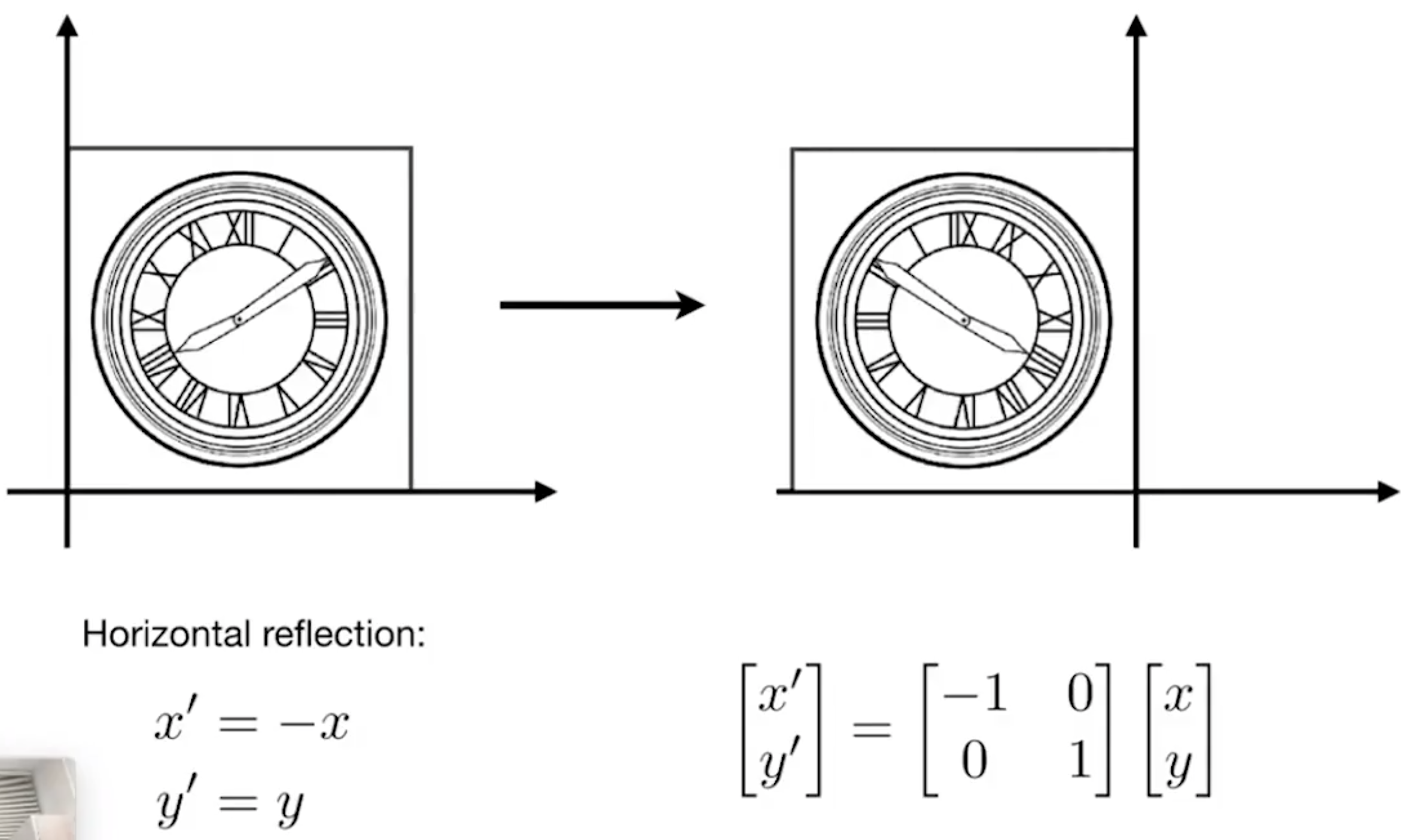
- Reflection
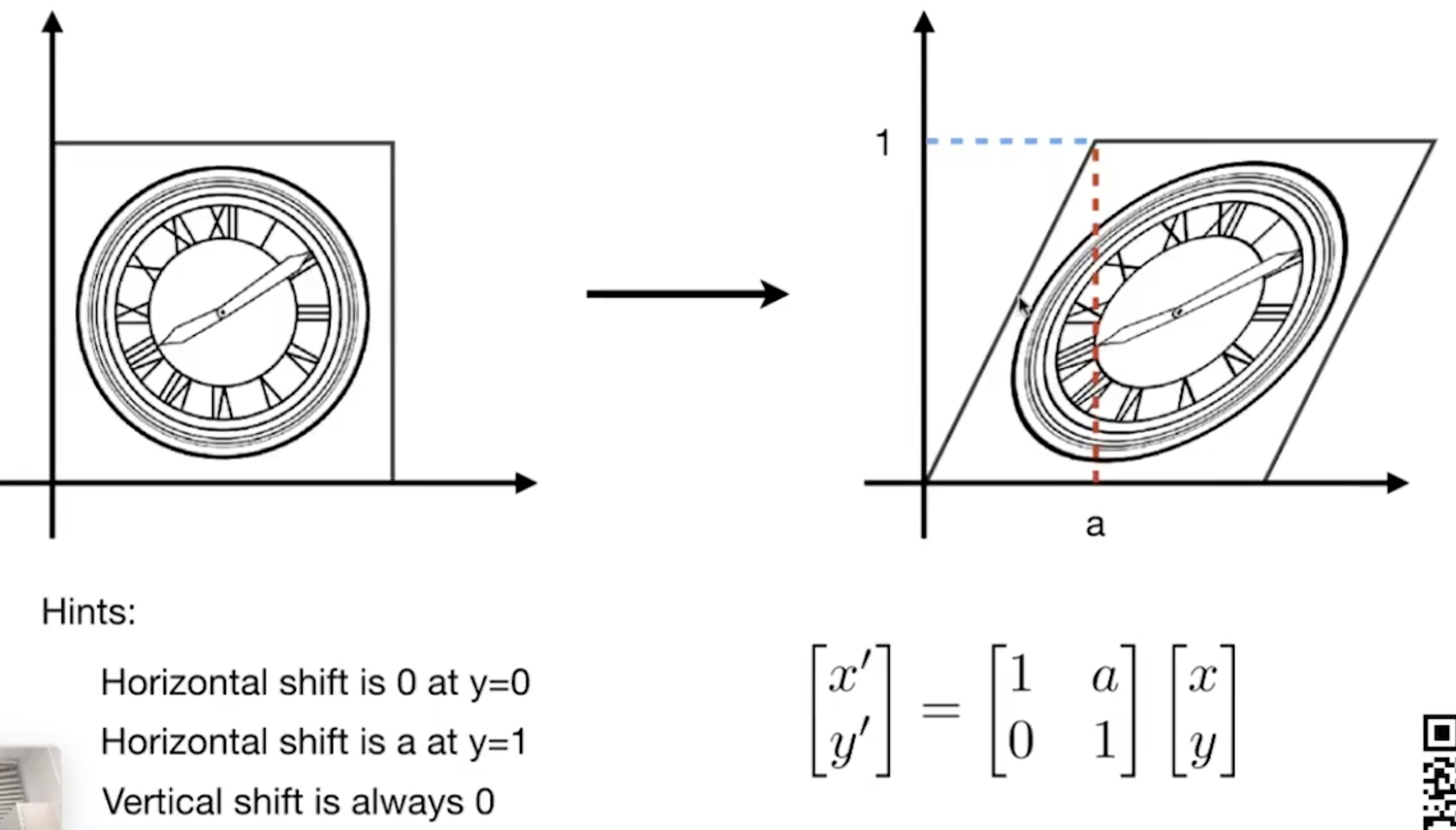
- Shear(切变)
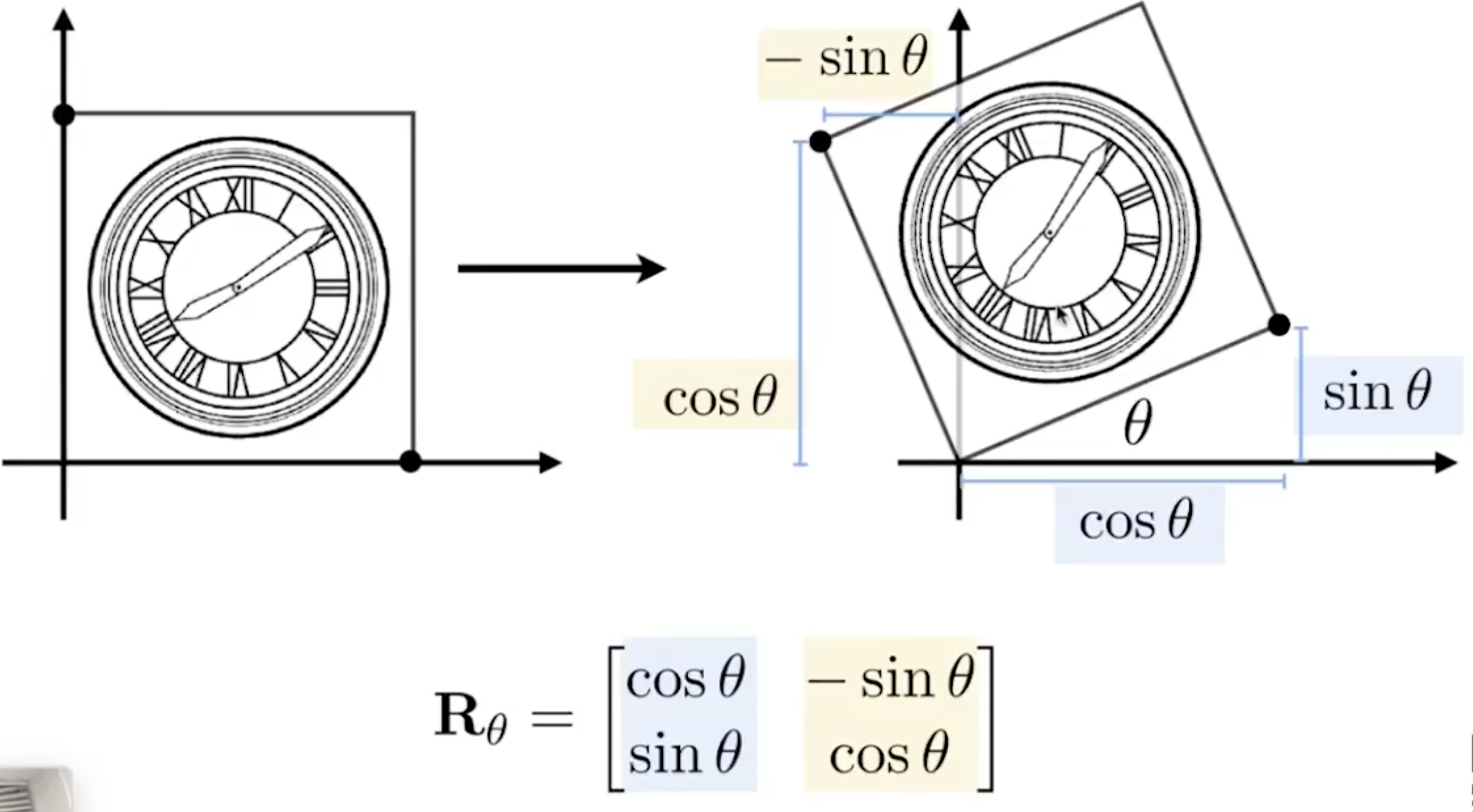
- Rotation(特殊化点,推导(旋转绕原点
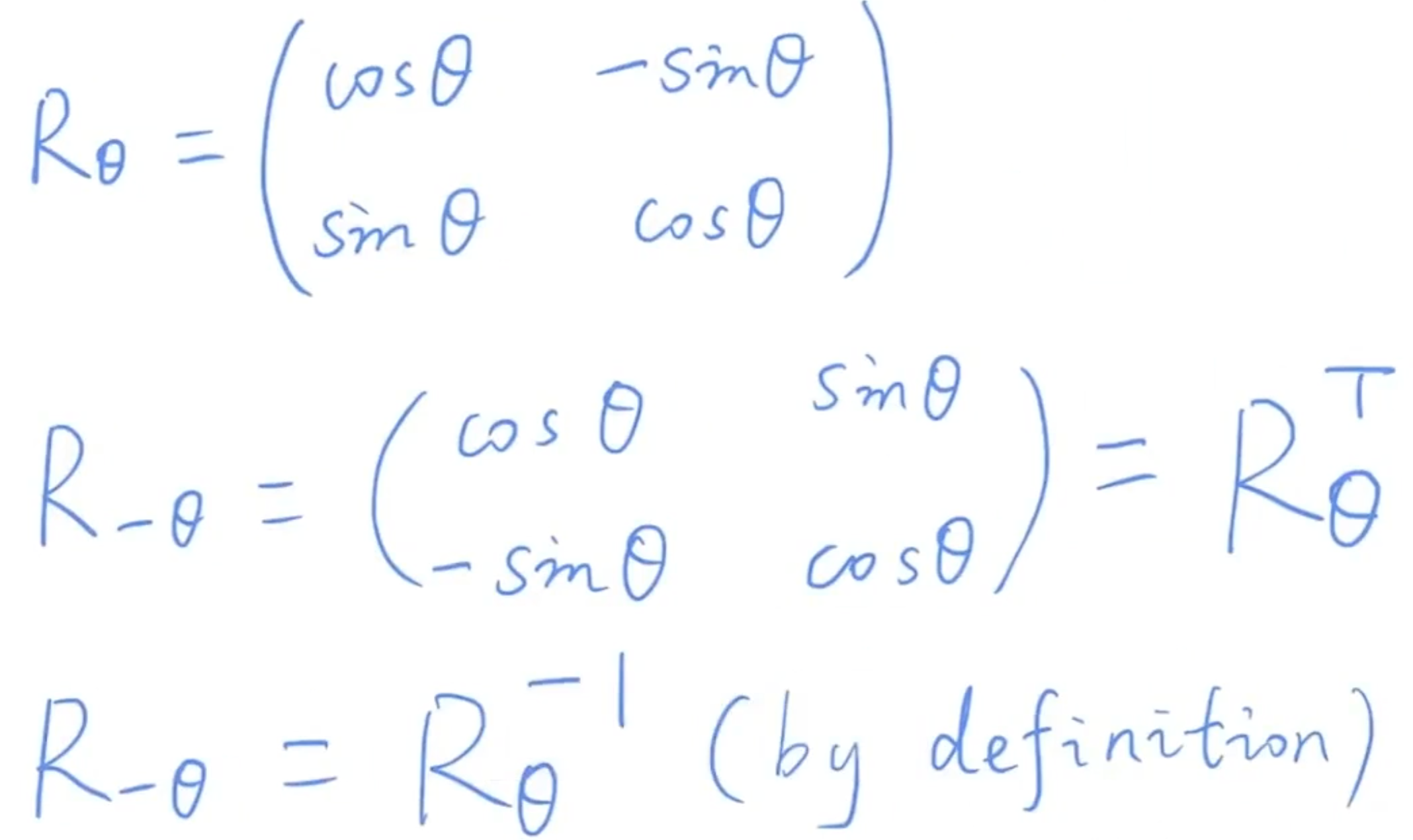
- 正交矩阵,转置 = 逆
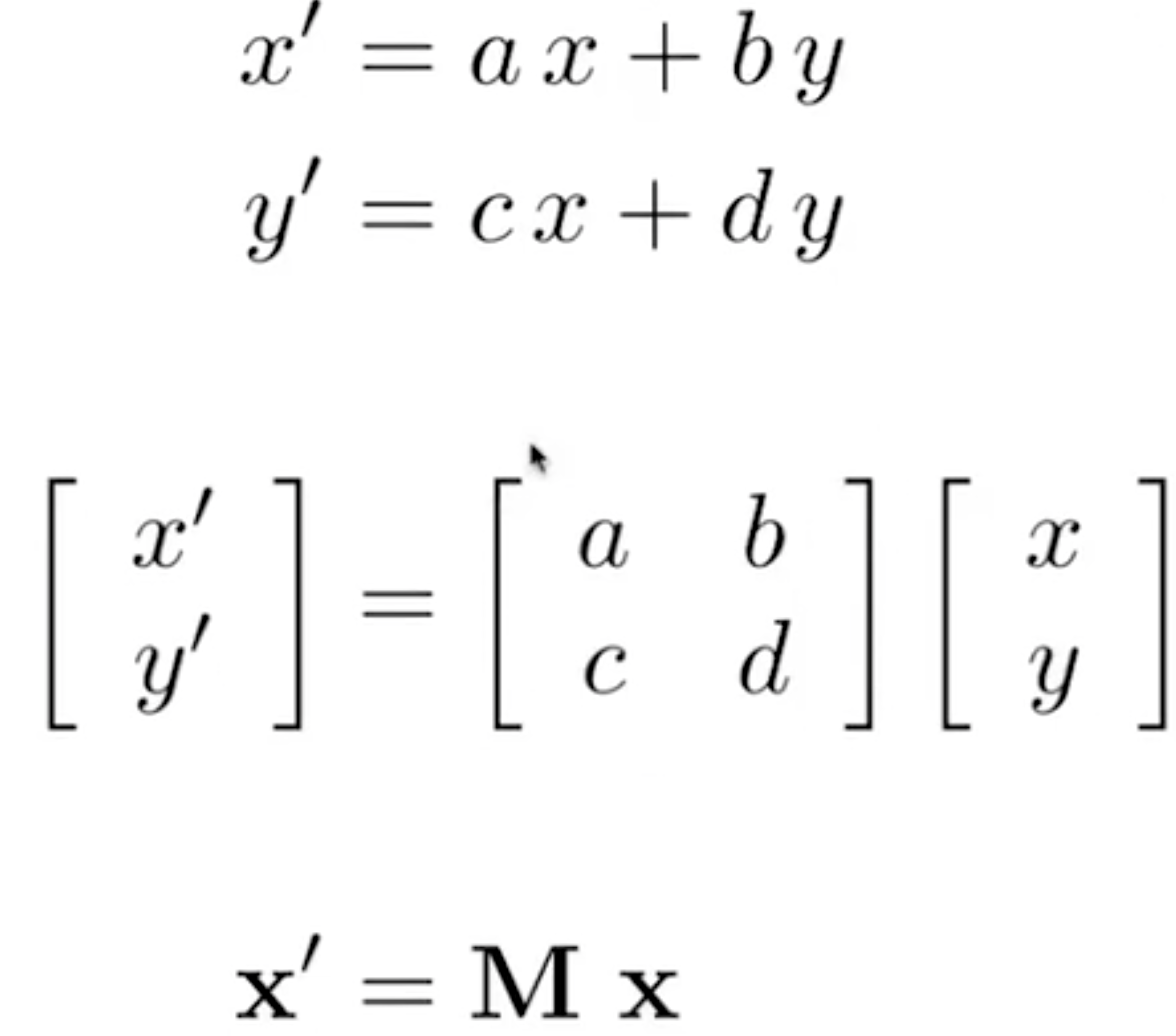
- 线性变换(写成矩阵形式
其次坐标
平移变换——非线性变换,上述矩阵无法满足
引入其次坐标
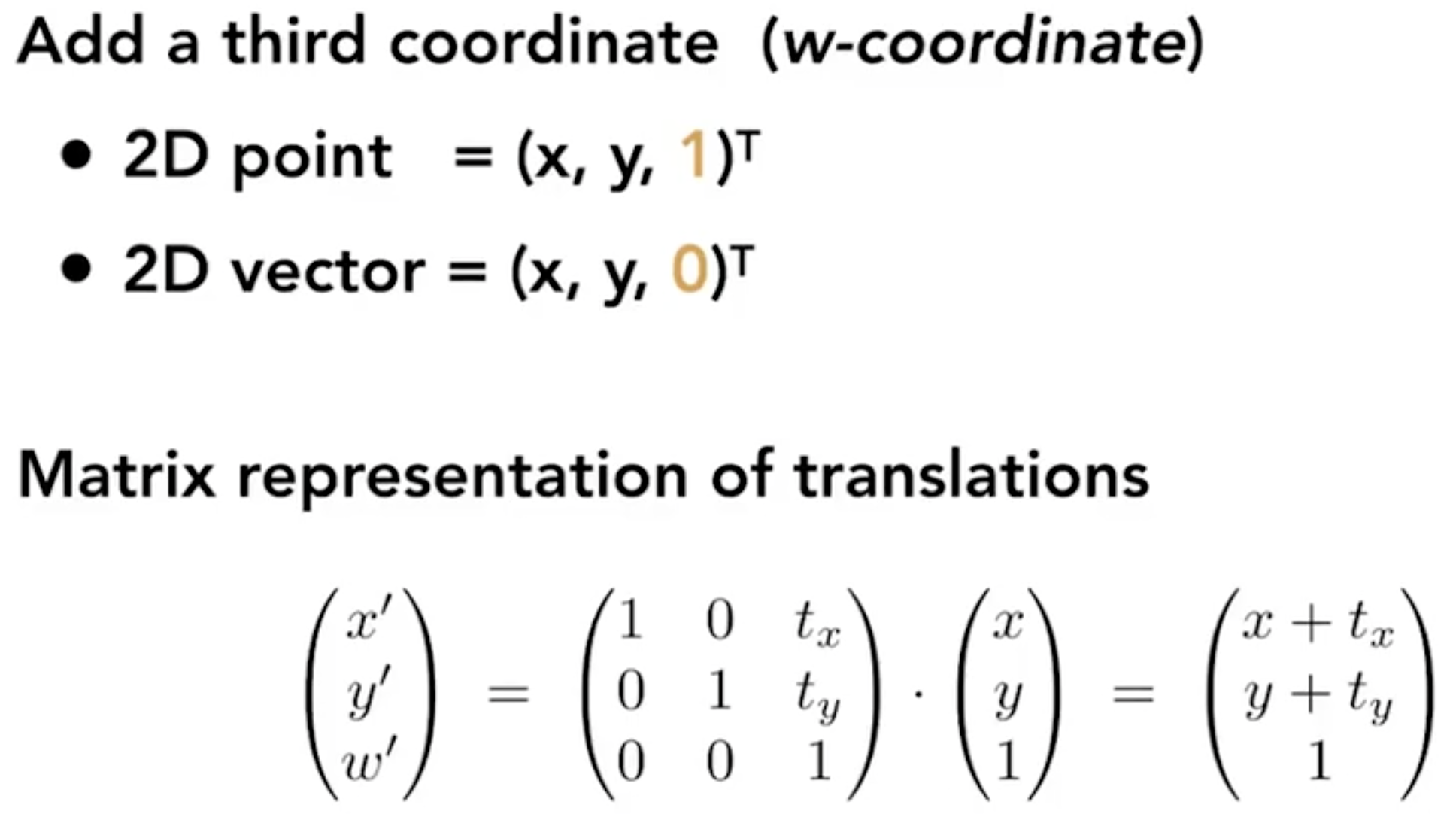
- 1和0用于区分是点还是向量
- 向量是0: 因为向量具有平移不变性
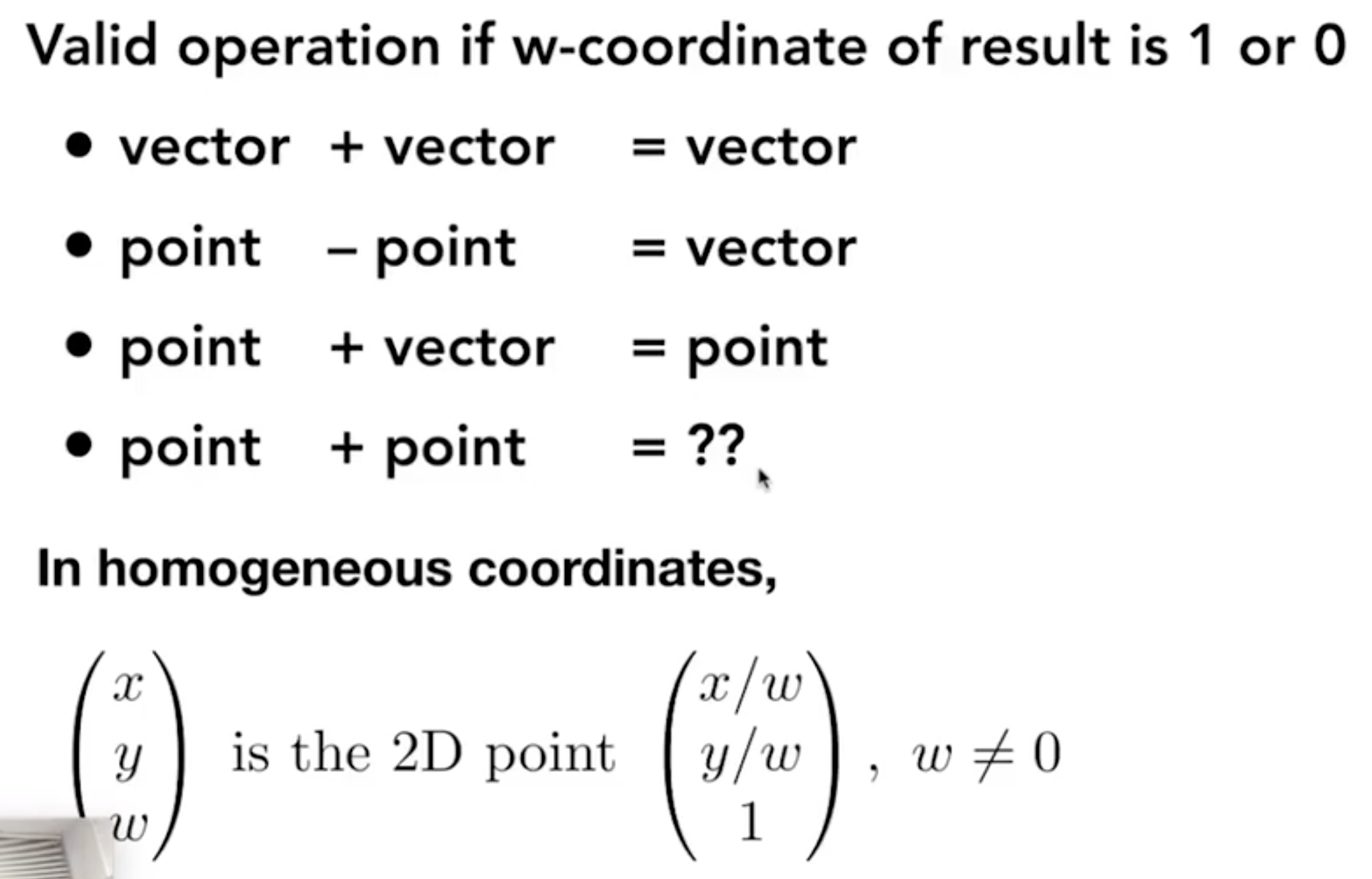
- point + point得到两点间中点
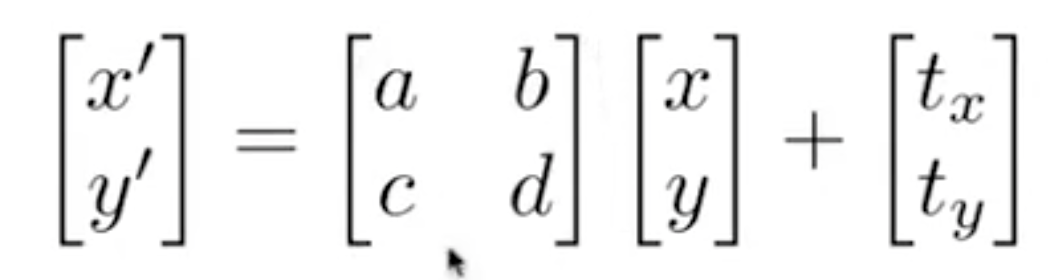
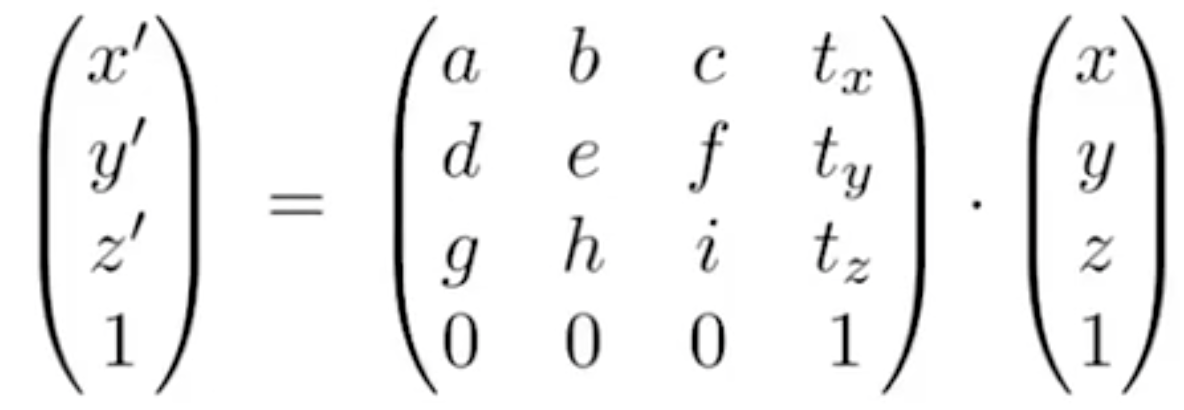
- Affine Transform 仿射变换
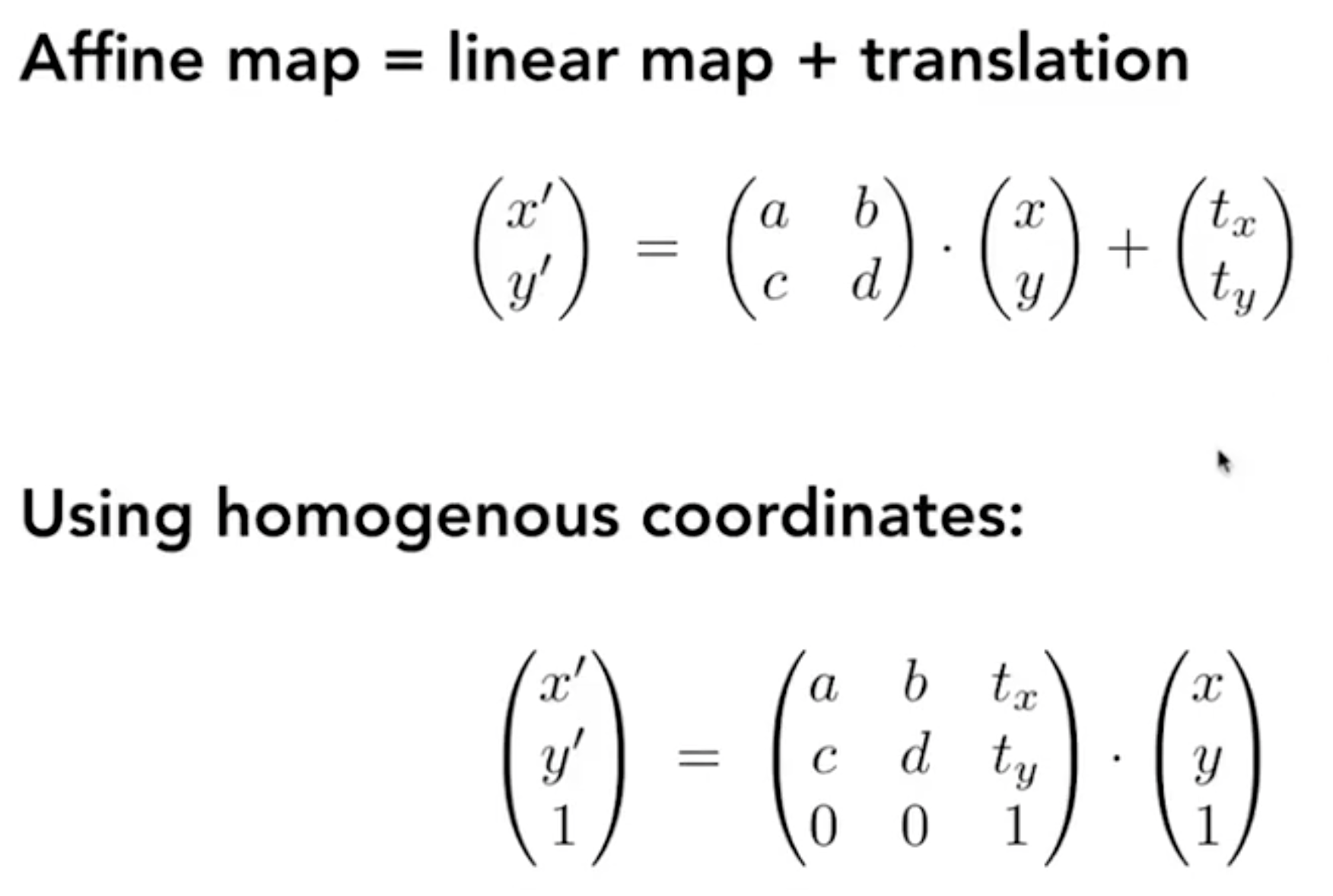
- $\begin{pmatrix}线 & 性 & 平\\ 变 & 换 & 移\\ 0&0&1 \\ \end{pmatrix}$
- 逆变换
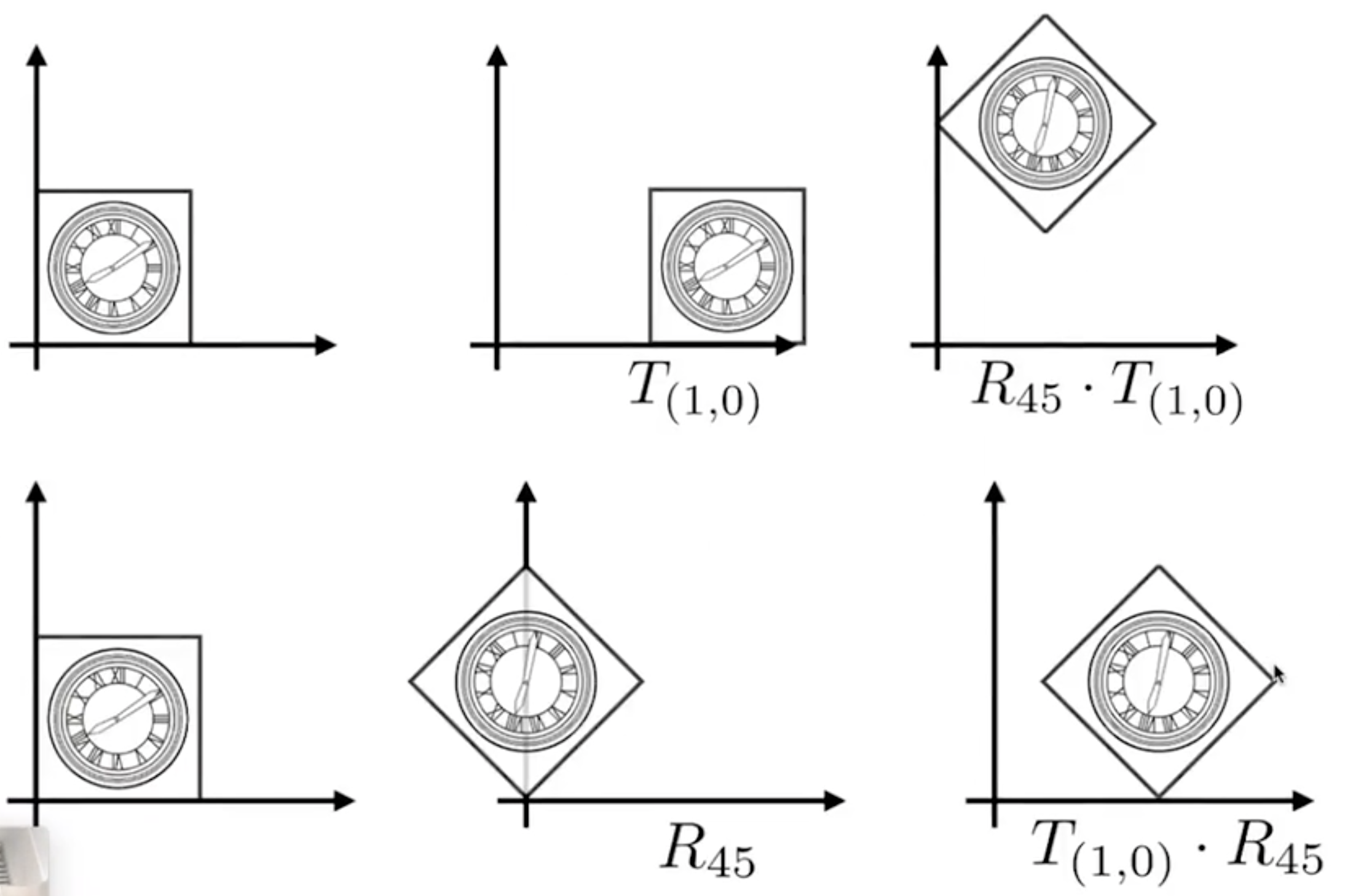
- 复合变换:分步左乘变换矩阵,不满足交换律

- 先应用线性变换,再平移
3D Transformation
- 引入其次坐标
- $3D\quad point = (x, y, z, 1)^T$
- $3D \quad vector = (x, y, z, 0)^T$
- 仿射变换
P4
3D Transformation
- 三维空间旋转
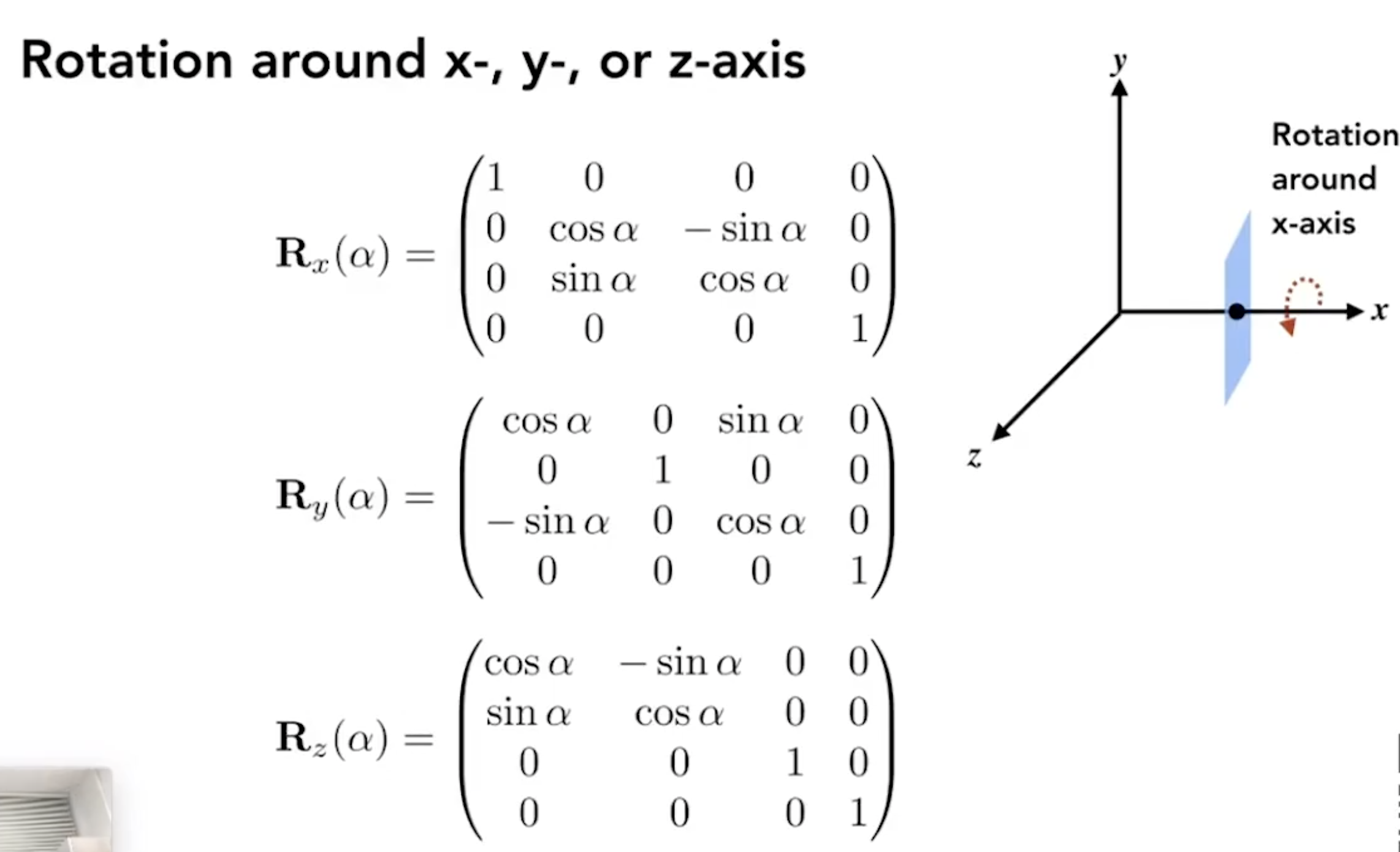
- Y轴旋转相反:X ✖️ Z = -Y
- $R_{xyz}(\alpha, \beta ,\gamma) = R_x(\alpha)R_y(\beta)R_z(\gamma)$ 三维空间变换分解
- $\alpha$, $\beta$ ,$\gamma$ 为欧拉角
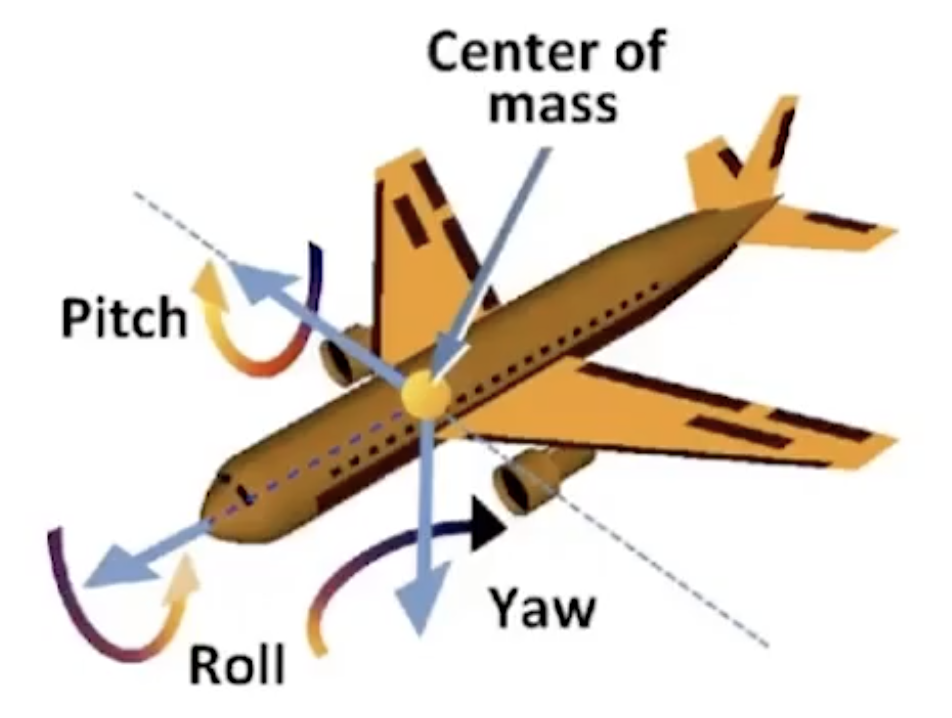
- Yaw, Pitch, Roll描述三维空间变换
- 罗德里格斯旋转公式:绕n轴旋转$\alpha$

Viewing Transformation 视图变换
得到$[-1, 1]^3$的立方体
View/Camera Transformation
- MVP变换
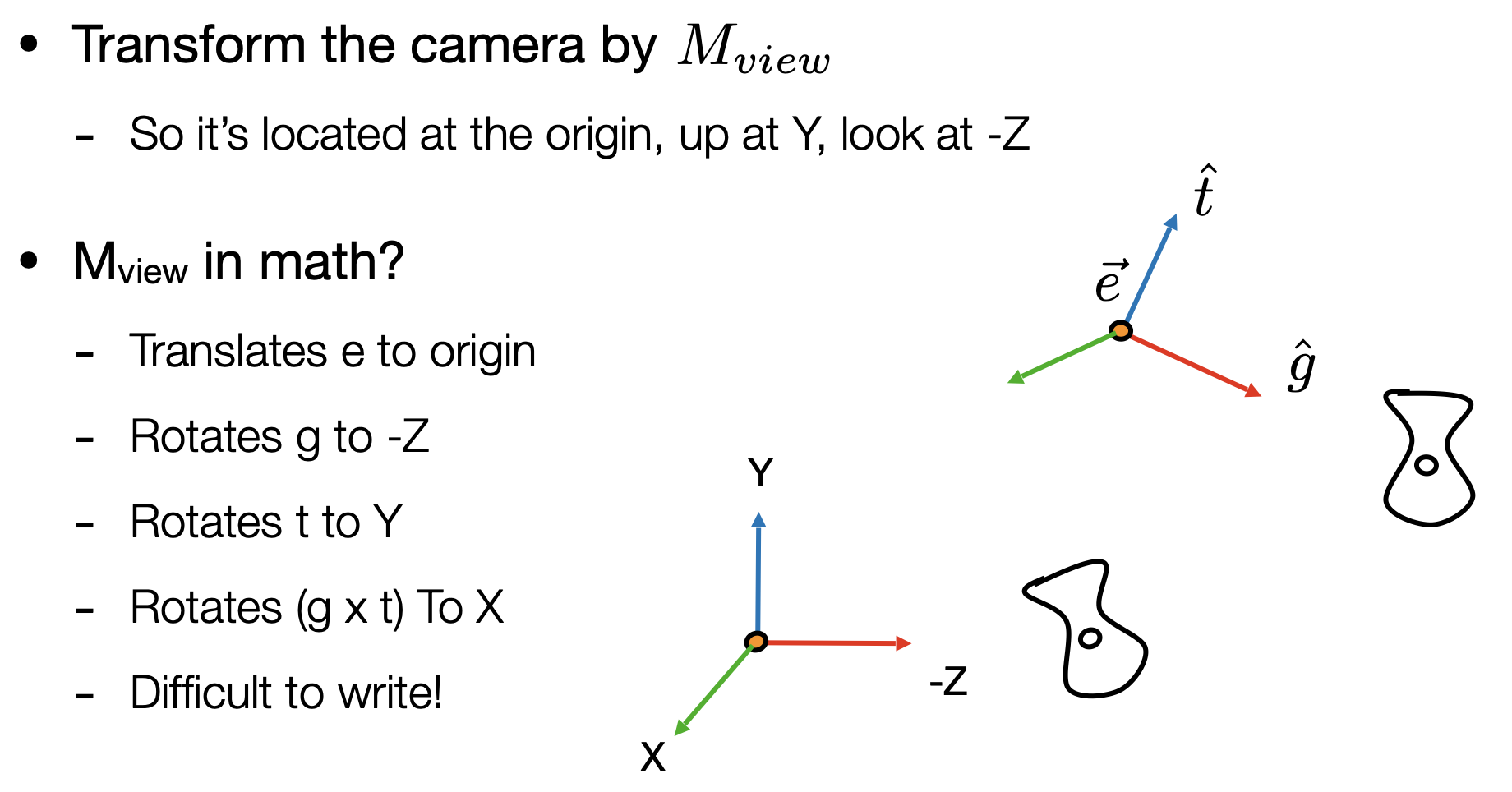
- How to perform view transformation? 得到$M_{view}$视图变换矩阵
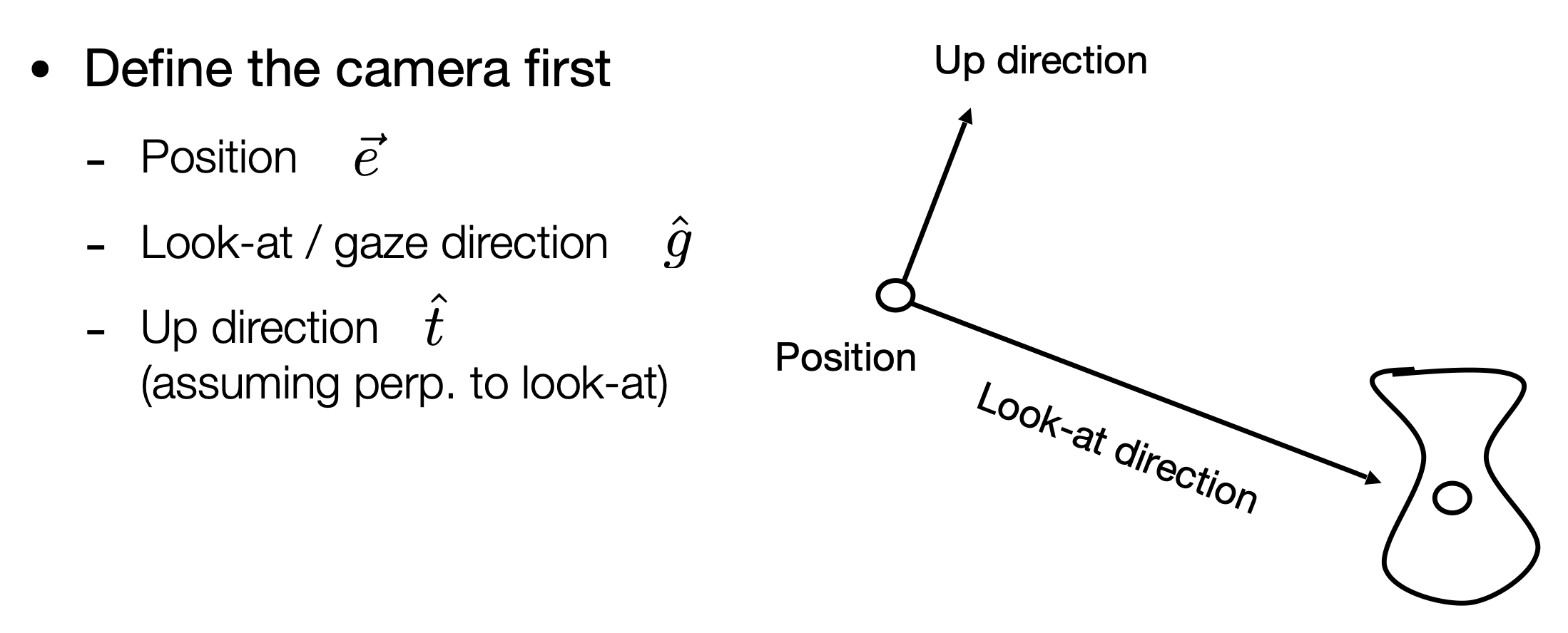
- Up Direction:用一个向量定义相机向上的方向
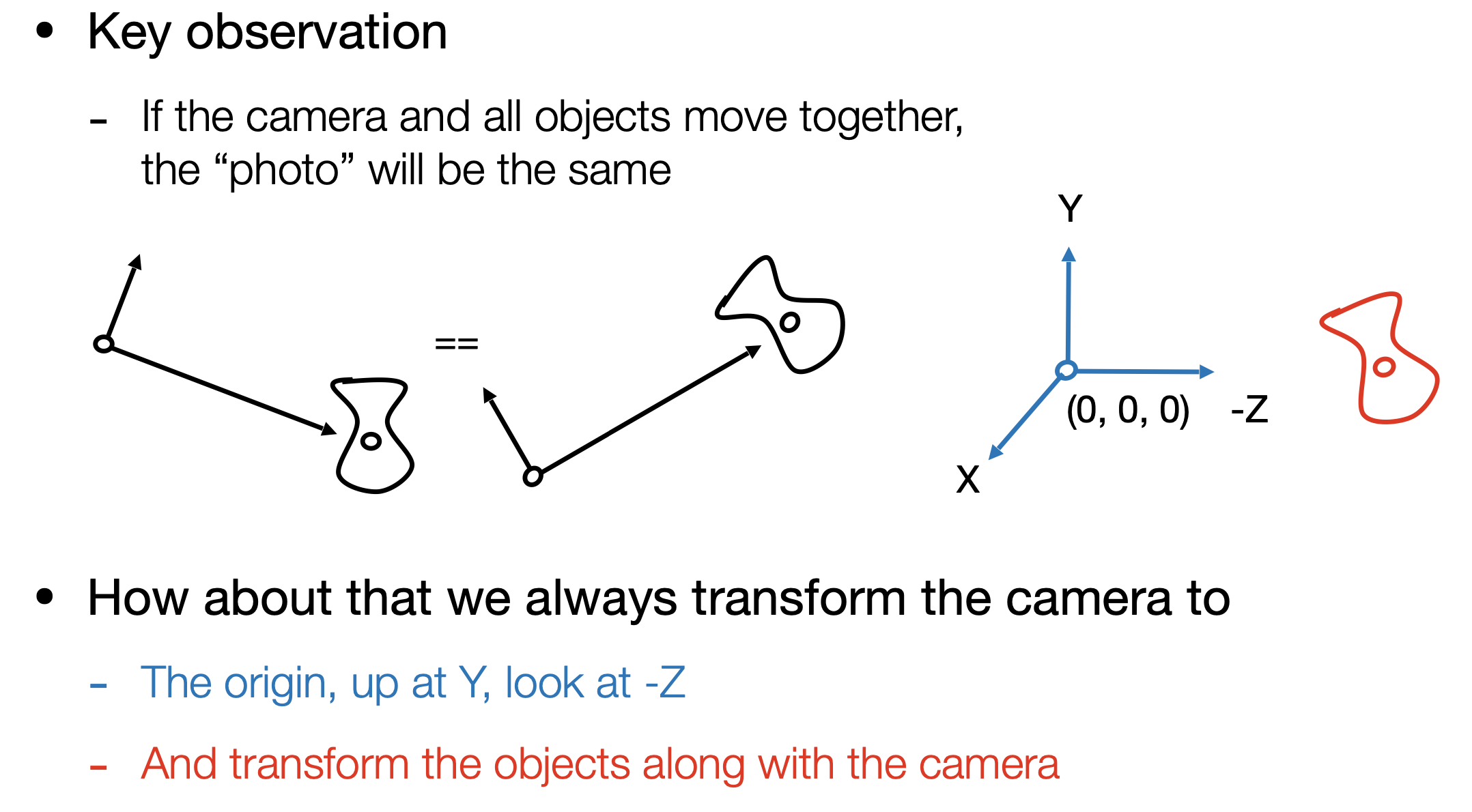
- 相机放在标准位置(0, 0, 0),向-Z看,上方向为Y
- 实现上一步的步骤
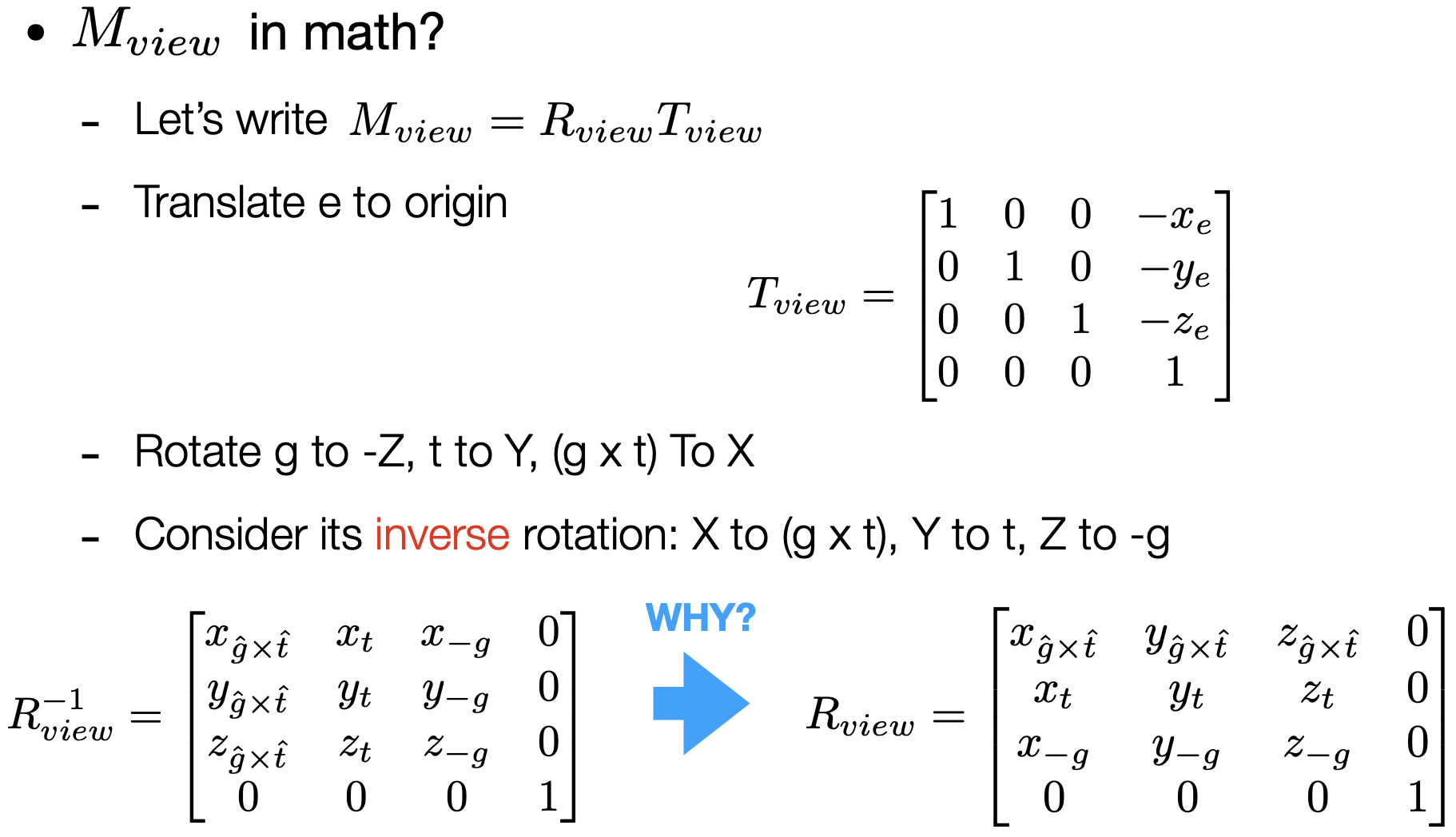
- R~view~^-1^:将xy -z旋转到etg(代入X(1,0,0,0)^T^, Y(0,1,0,0)^T^, Z(0,0,1,0)^T^可以验证XYZ向量的旋转得到etg)
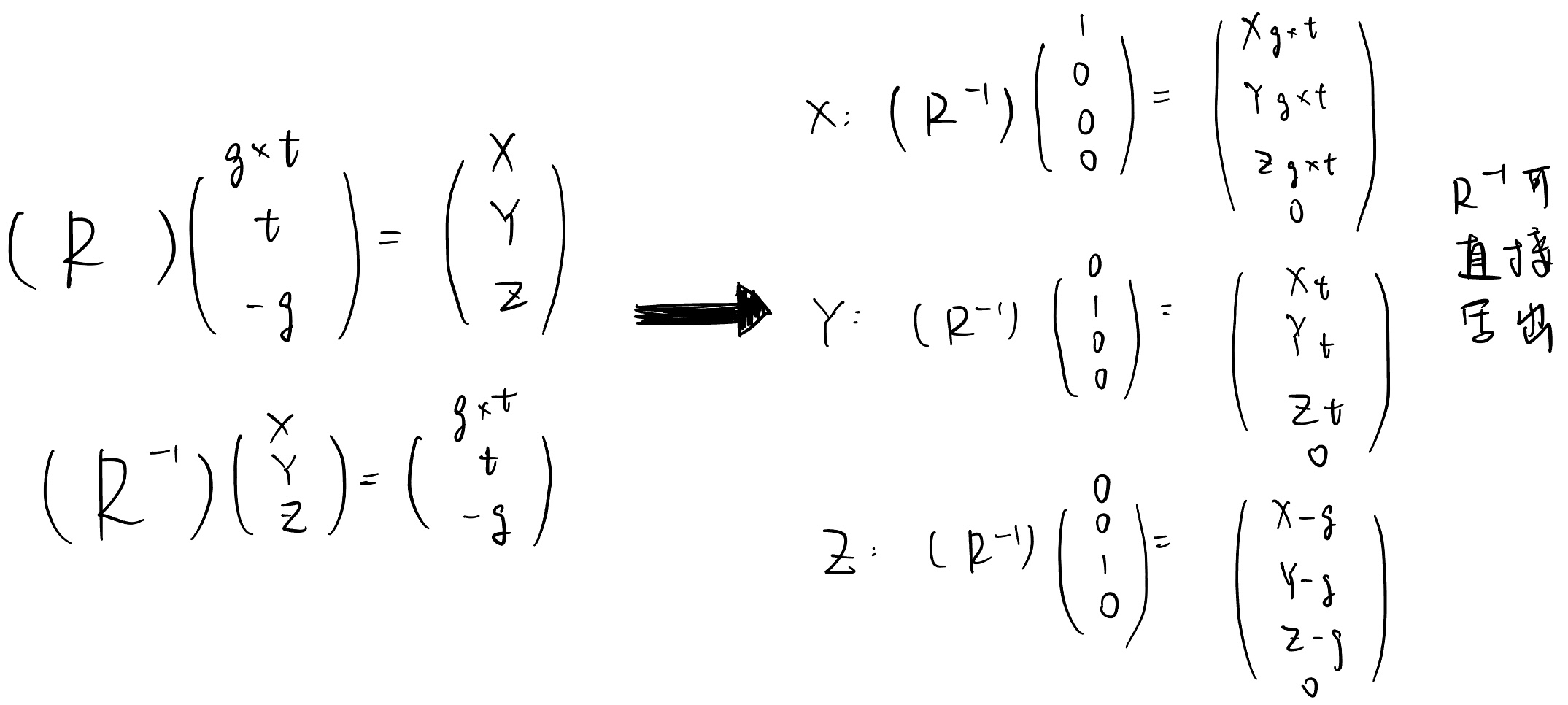
- 正交矩阵,逆 = 转置
- R~view~^-1^:将xy -z旋转到etg(代入X(1,0,0,0)^T^, Y(0,1,0,0)^T^, Z(0,0,1,0)^T^可以验证XYZ向量的旋转得到etg)
- 总结
- $M_{view}$视图变换操作相机,其他物体跟着相机发生变换
- 得到的结果:相机在原点,朝向-Z,上方向为Y
- ModelView Transformation模型视图变换:移动相机模型跟着变换,Model和View可相提并论
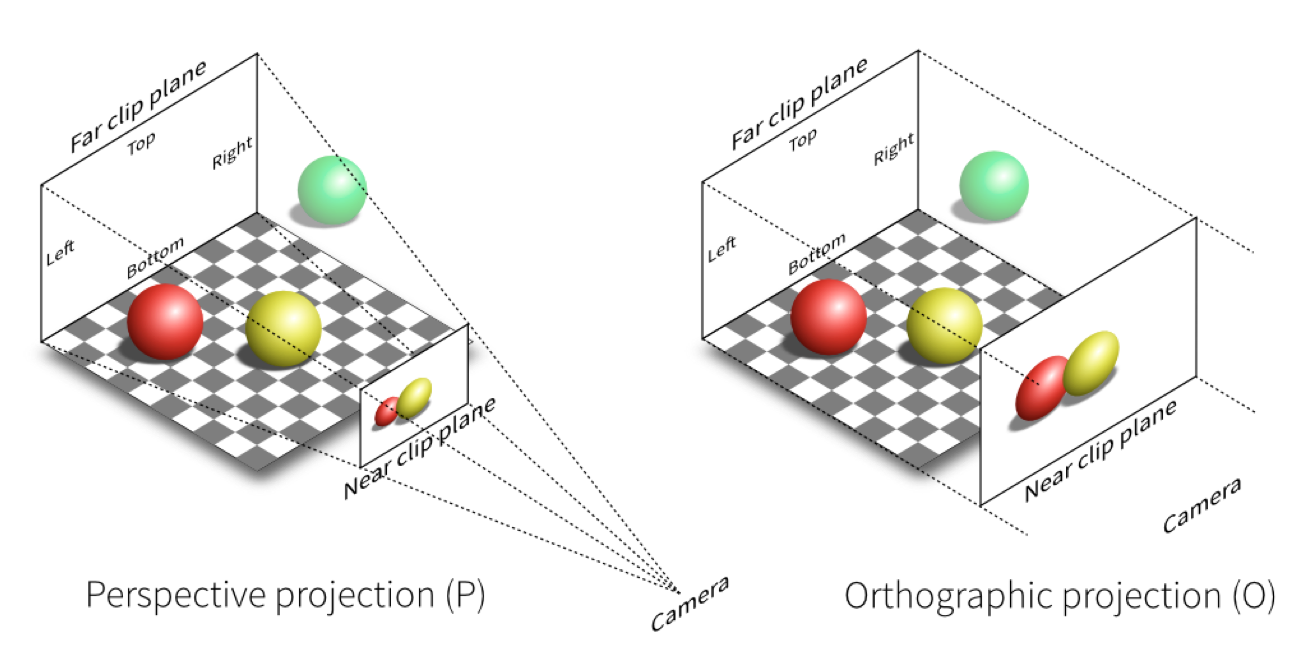
Projection Transformation
- Ortho vs. Persp
Orthographic Projection正交投影
- 简单做法
- 仍掉Z
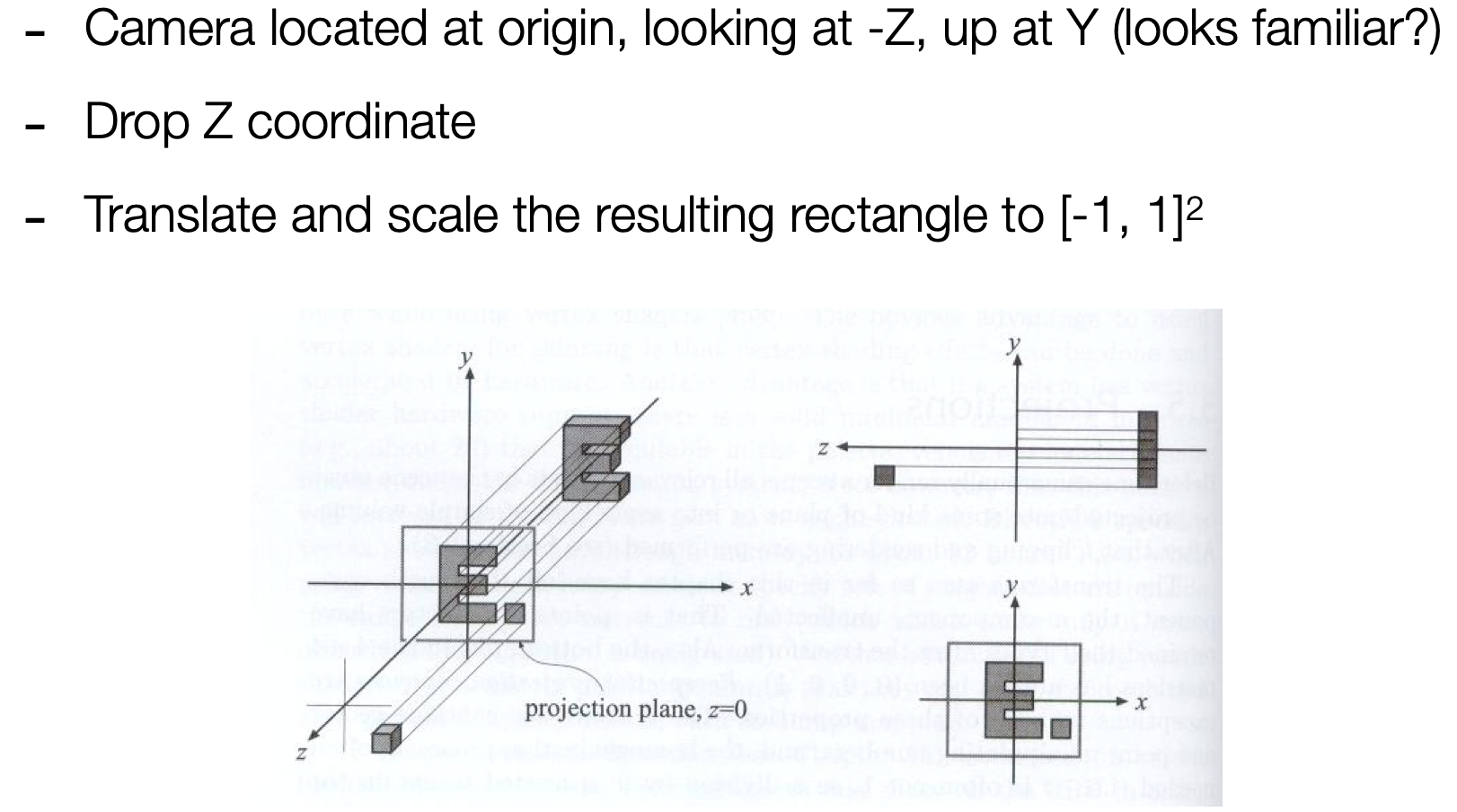
- 仍掉Z
- 正式做法
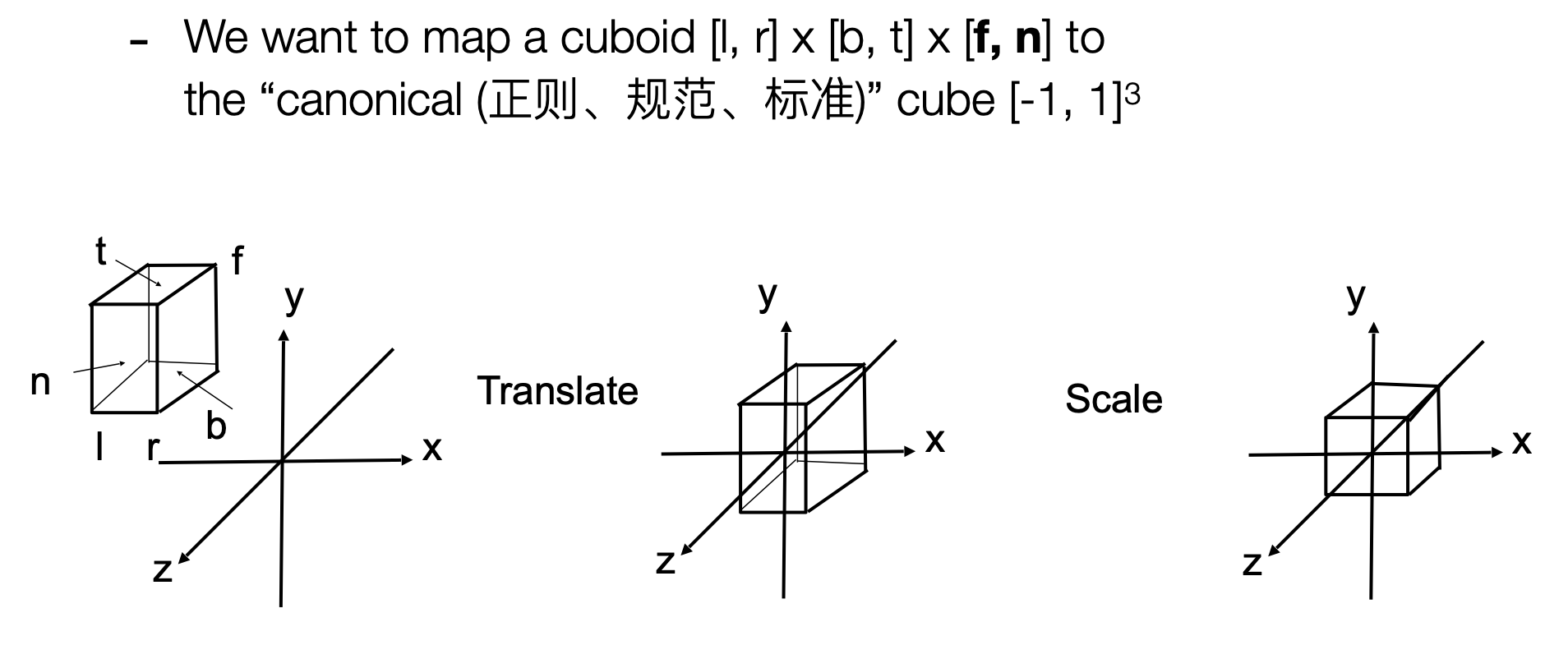
- 定义立方体(三个轴的范围)
- 将立方体中心移到原点
- 映射到$cube[-1, 1]^3$
- $M_{ortho}$正交变换矩阵
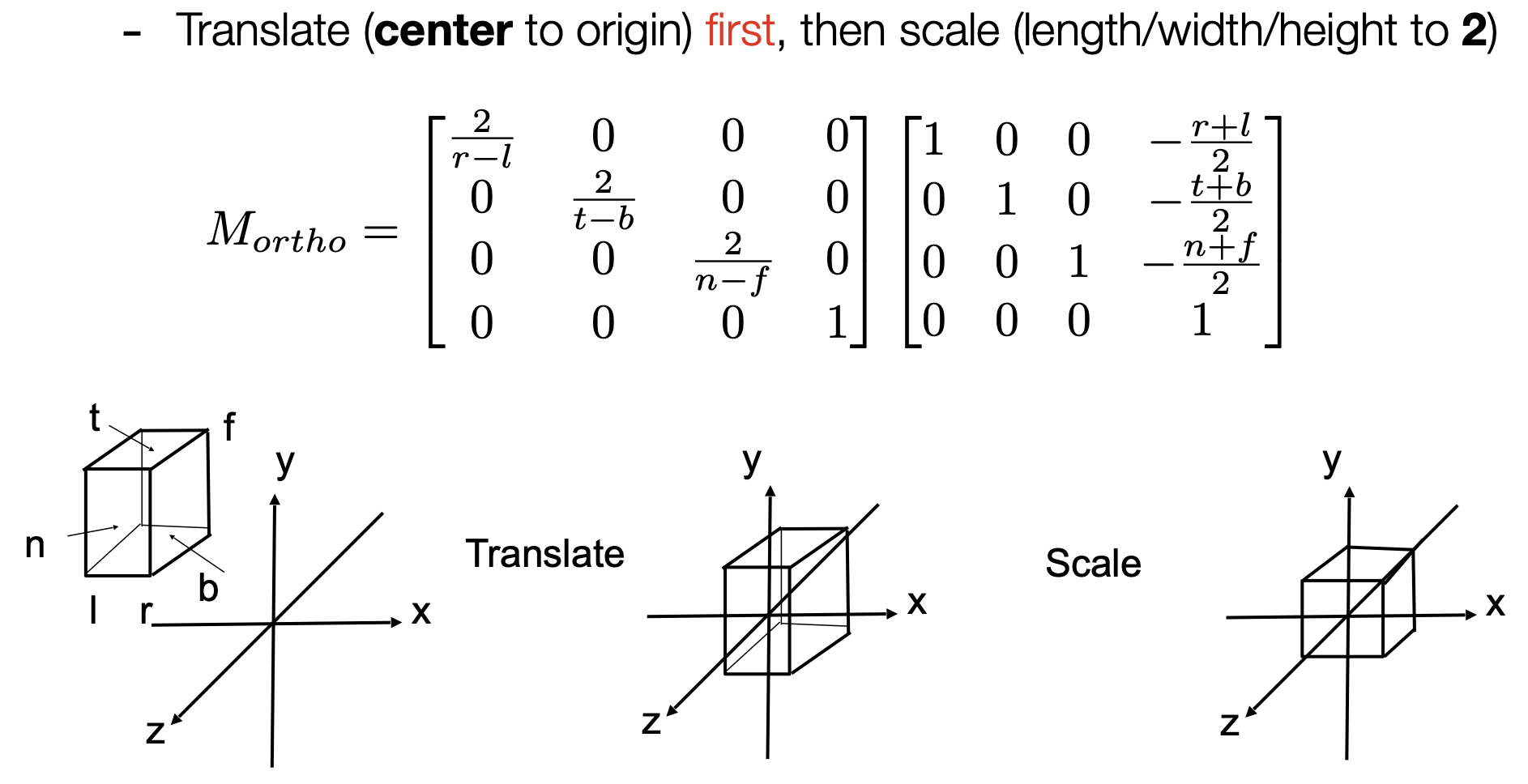
- 先平移,再缩放
- 注意⚠️
- 这里使用右手系。看向-Z方向,所以n平面(近处)的Z数值比f平面(远处)大
Perspective Projection 透视投影
- 知识回顾
- 步骤
- 概述:
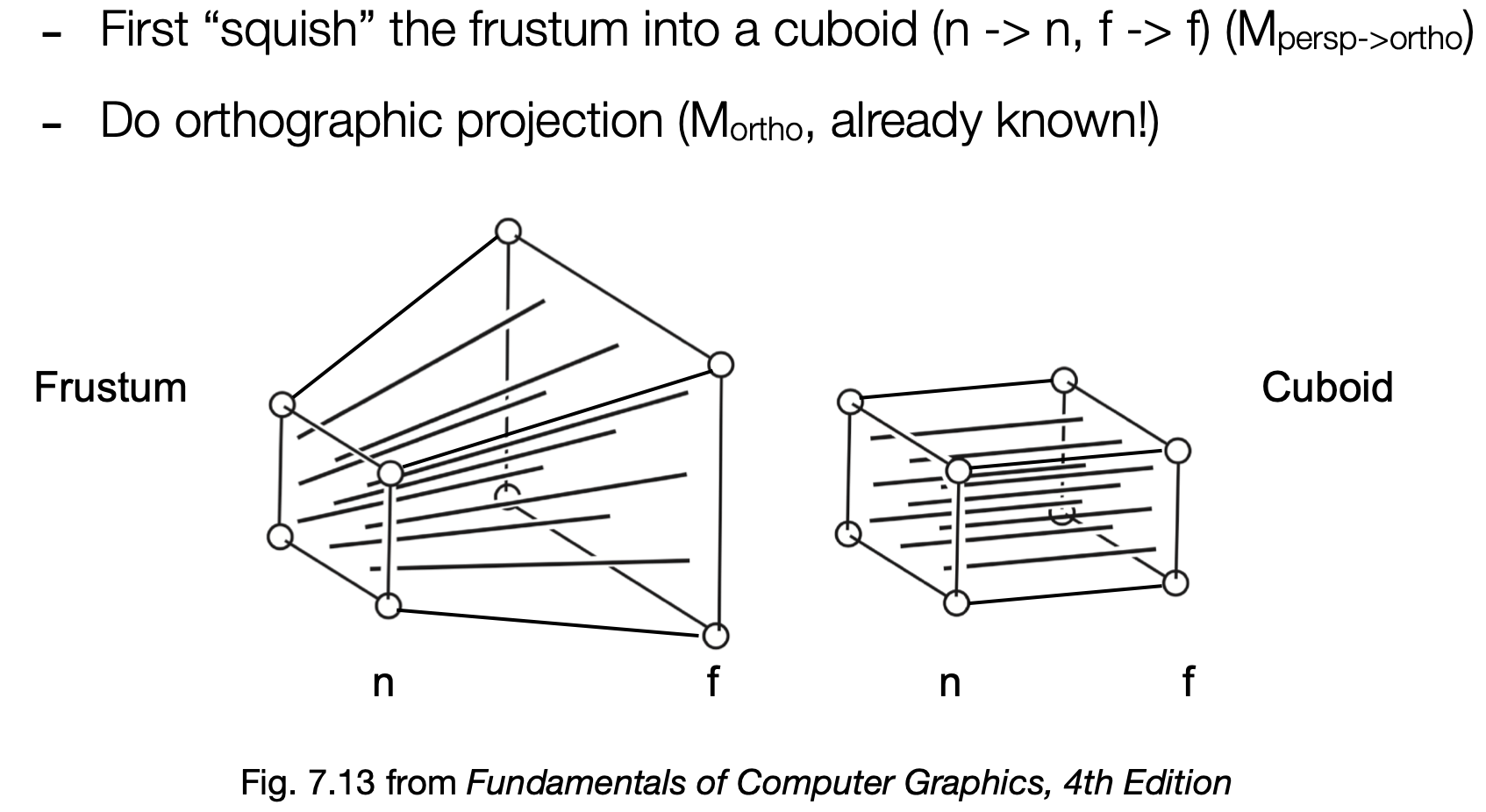
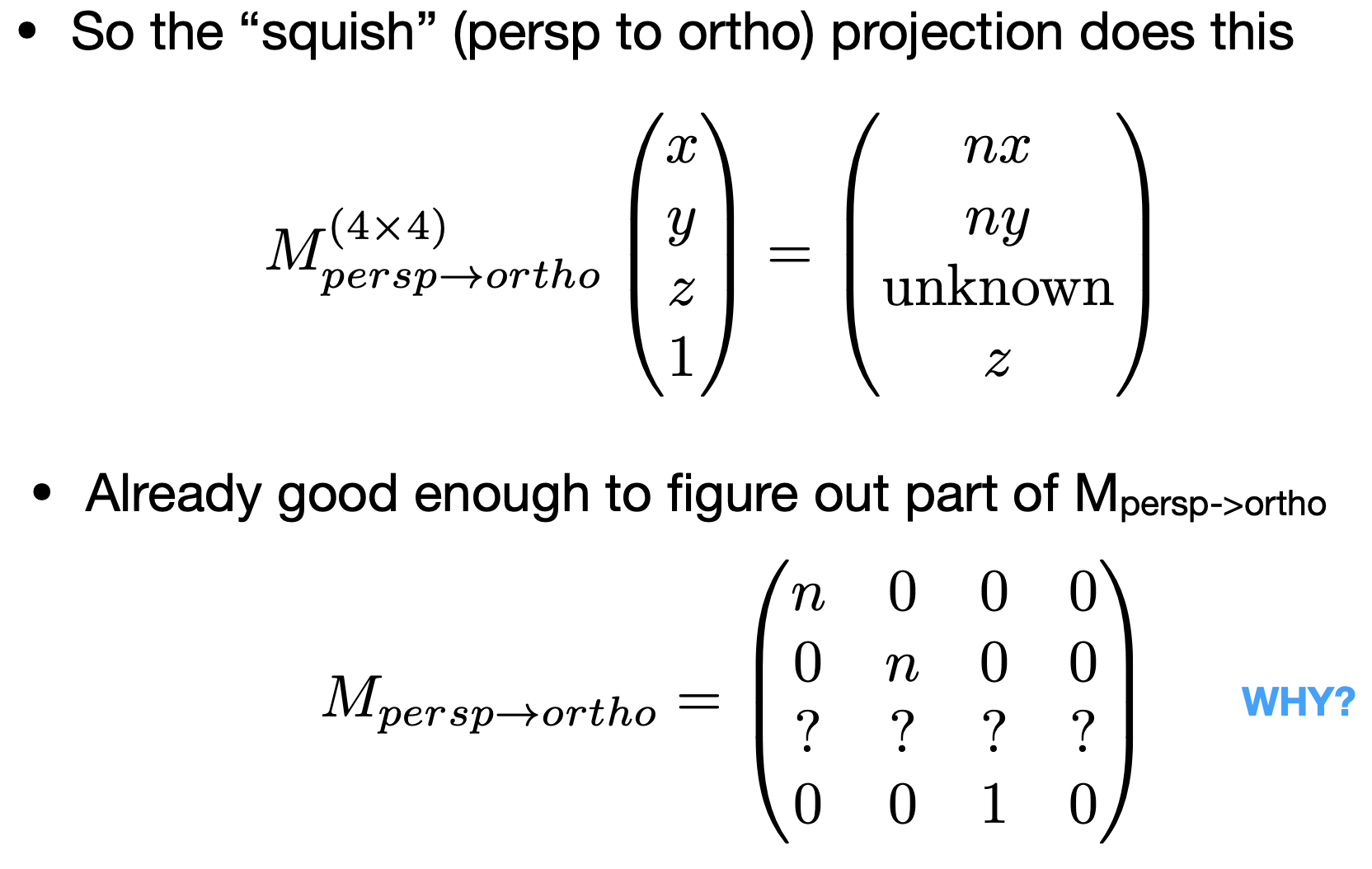
- 将视锥远平面压缩到长方体中($M_{persp->ortho}$)
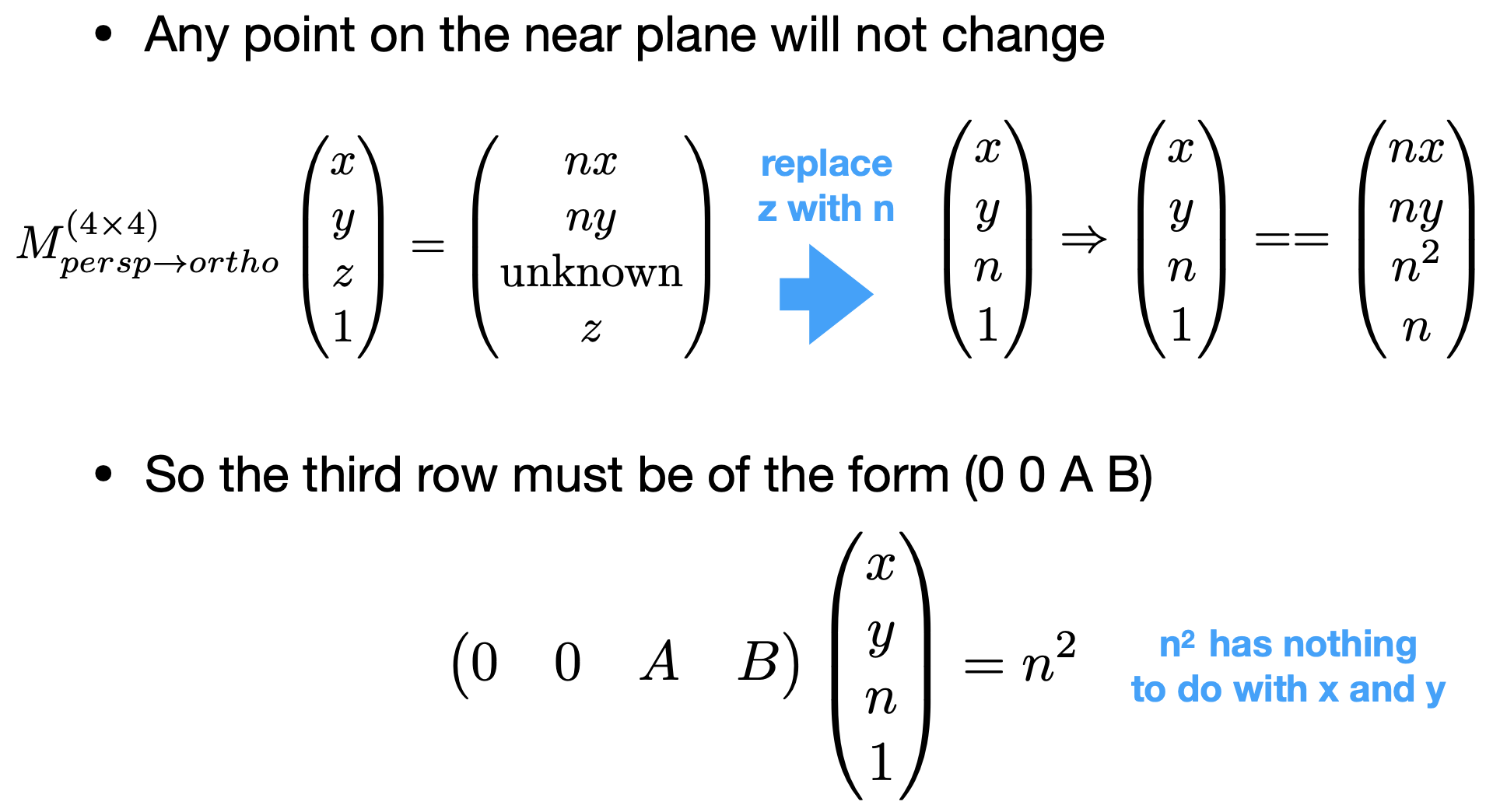
- 近平面永远不变
- 远平面中心点不变,Z不变
- 长方体做正交投影($M_{ortho}$)
- 将视锥远平面压缩到长方体中($M_{persp->ortho}$)
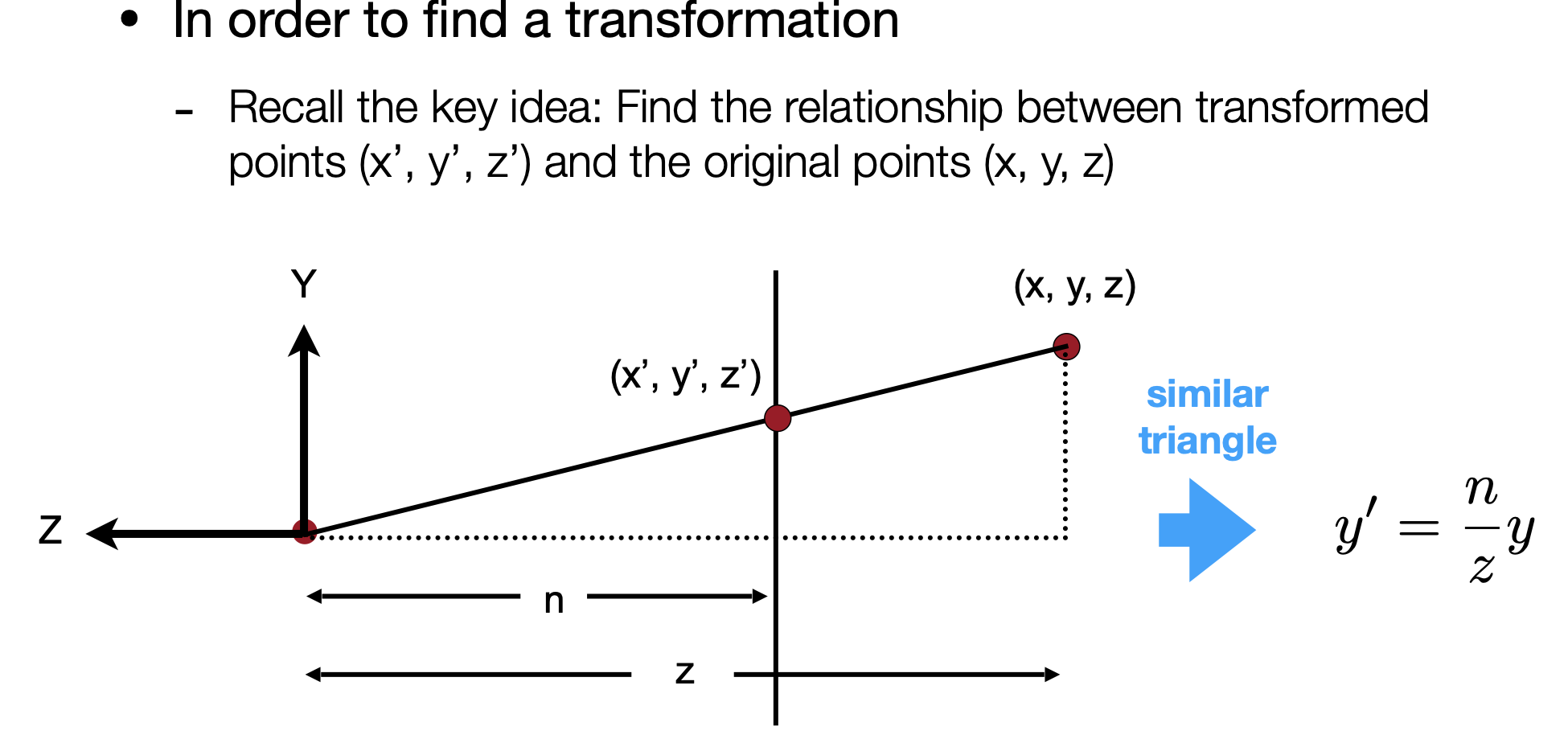
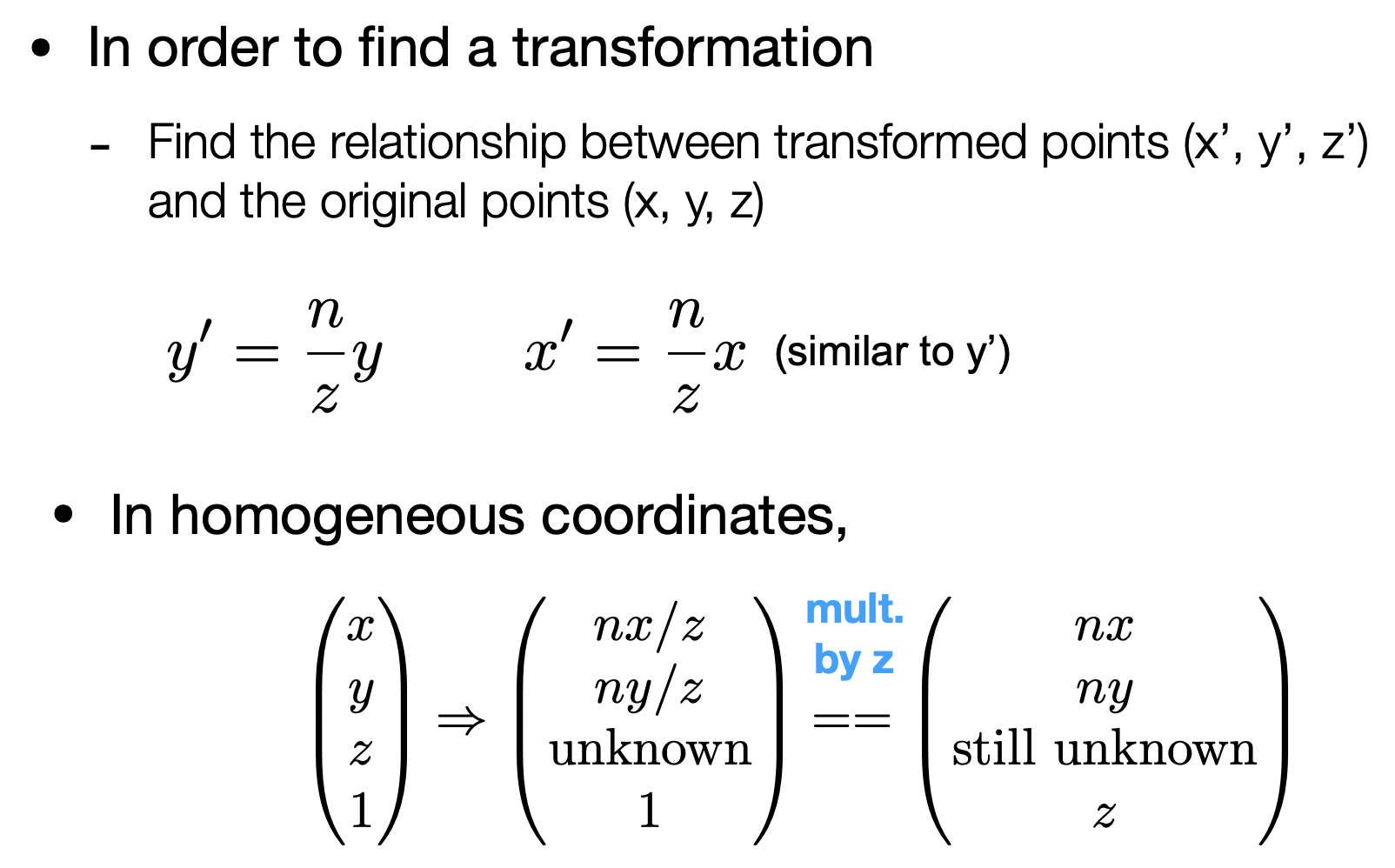
- STEP1:将persp视锥远平面压缩到ortho长方体中,xy可通过相似三角形计算,z未知
- 关于Y如何被挤压
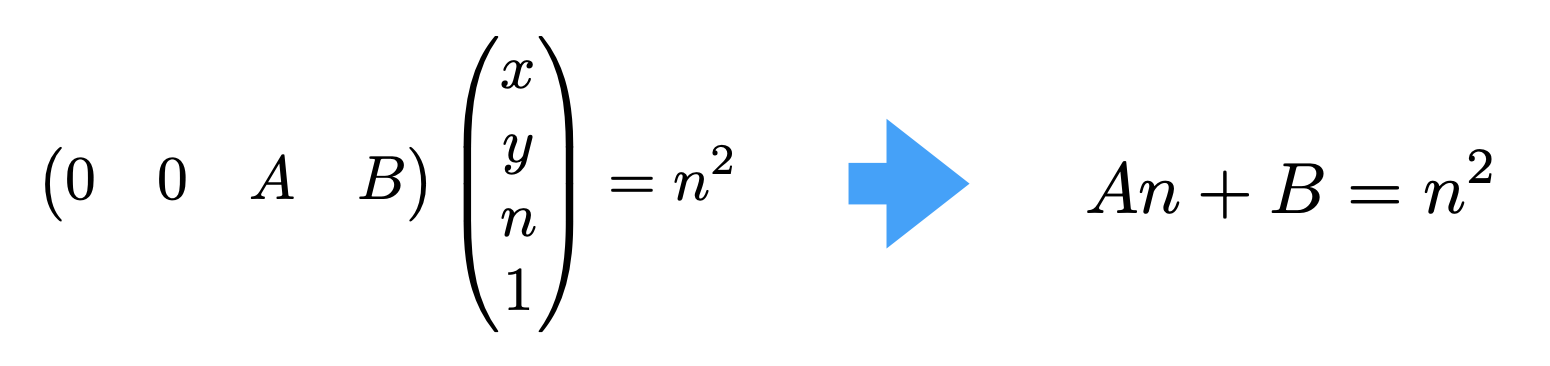
- 利用近平面的点(x, y, n, 1),特殊化求解第三行
- 下图右上角:$(x,y,n,1)^T$经$M_{persp->ortho}$变换后,还是会得到自己本身。因此乘n,得到与左上角格式类似的矩阵(此时的z=n),可看到unknown的值在近平面为$n^2$
- 利用远平面中点(0, 0, f, 1)不变
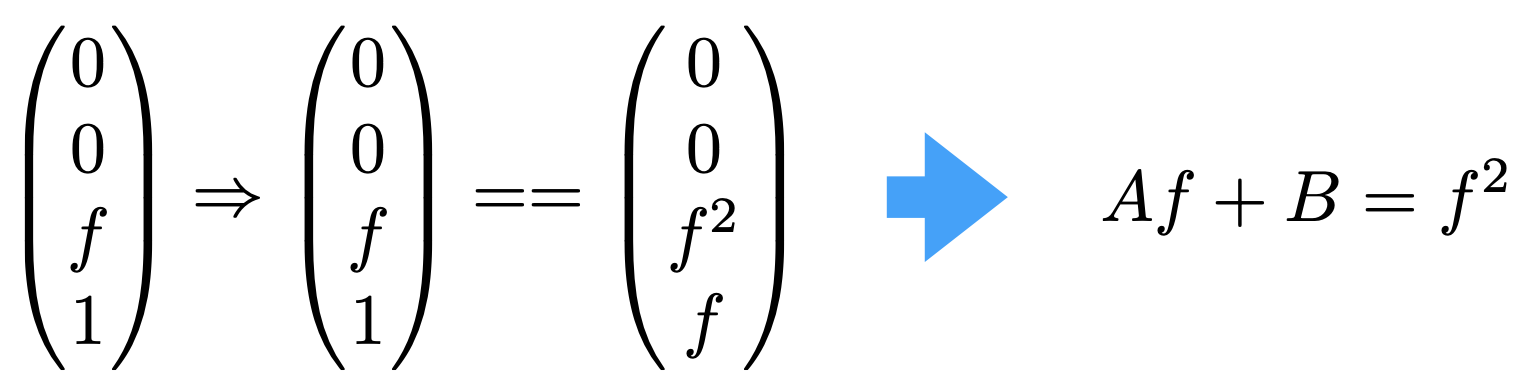
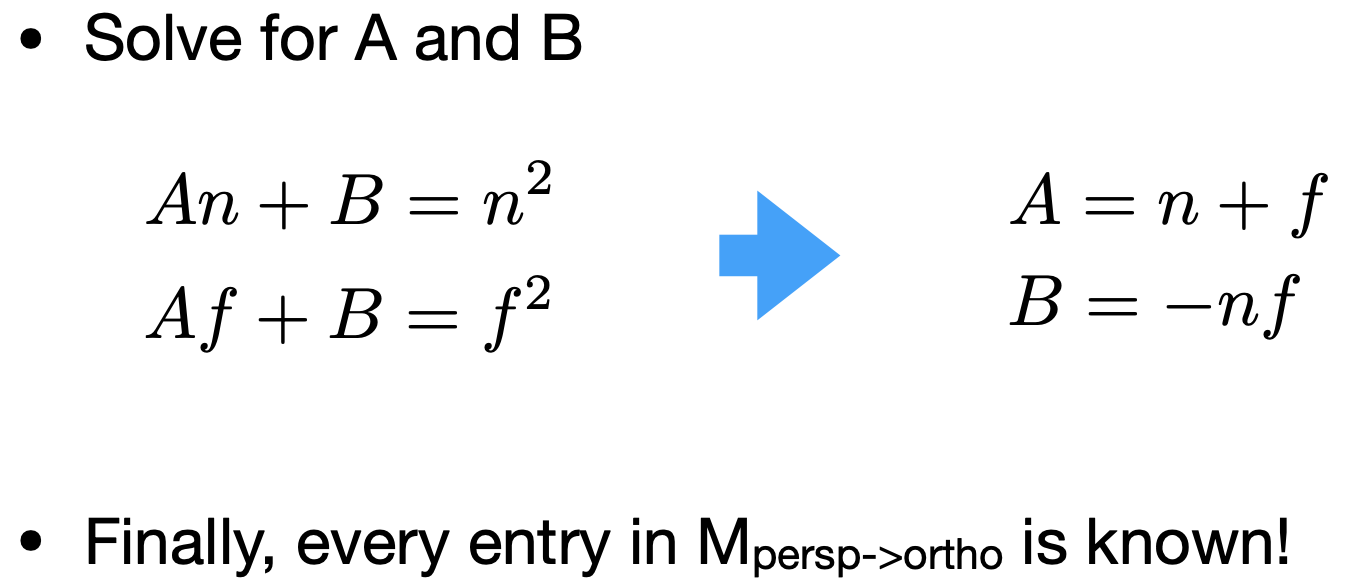
- $M_{persp->ortho} = \begin{pmatrix}n & 0 & 0 & 0\\ 0 & n & 0 & 0\\ 0 & 0 & n+f &-nf \\ 0 & 0 & 1& 0 \\ \end{pmatrix}$
- 利用近平面的点(x, y, n, 1),特殊化求解第三行
- 关于Y如何被挤压
- STEP2:对压缩后长方体进行$M_{ortho}$
- 概述: