Games101-P13-16 Ray Tracing
- P13 Preview
- Recursive (Whitted-Style) Ray Tracing
- Ray-Surface Intersection 光线和面求交:球体、隐式表面、三角面,及缺点
- Accelerating Ray-Surface Intersection 加速
- Ray Intersection with Axis-Aligned Box
- Recursive (Whitted-Style) Ray Tracing
P14&15 Preview
Using AABBs to accelerate ray tracing
- Uniform grids
- Spatial partitions 空间划分
- KD-Trees
- BVHs
Basic radiometry
- Radiant Energy $Q$ and Flux(Power) $\Phi$
- Intensity $I$:power per projected unit area
- Irradiance $E$:power per unit area
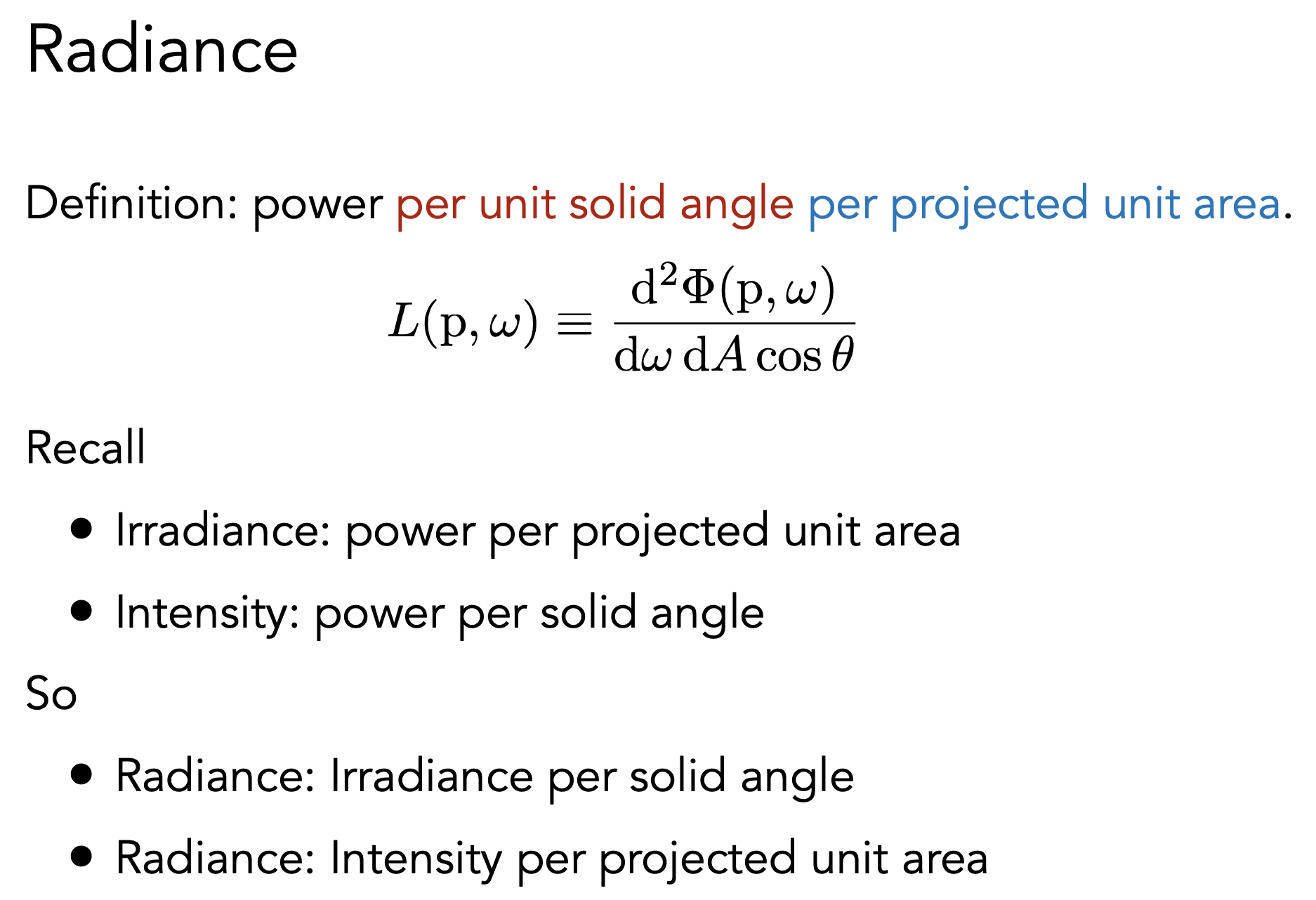
- Radiance $L$:power per unit solid angle & per projected unit area
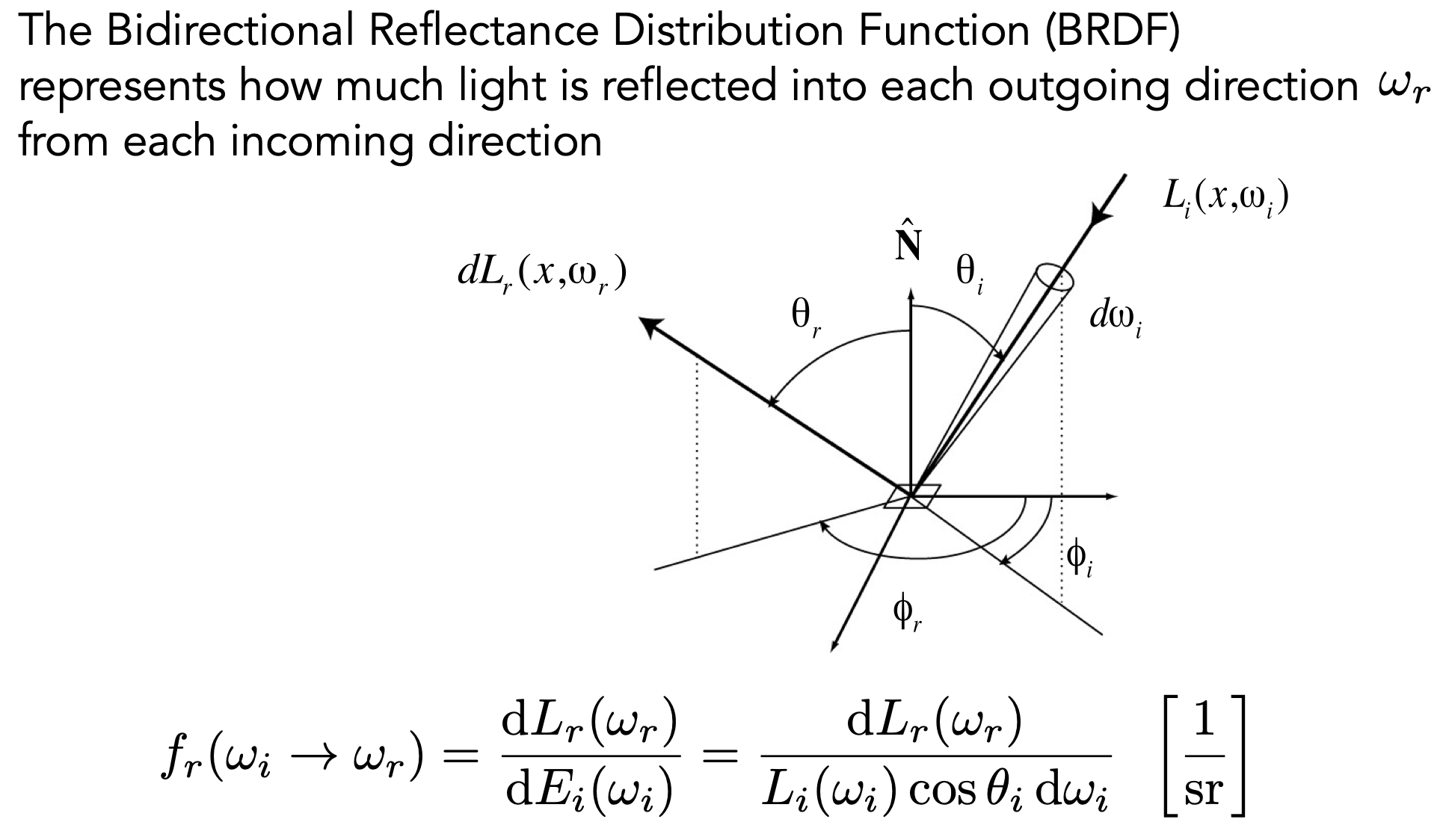
BRDF:是针对一个方向,出射Radiance($dL_r(\omega_r)$)/入射Irradiance($dE(\omega _i)$)的比例
反射方程
渲染方程
概率论回顾
P16 Overview
Monte Carlo Integration
Path Tracing
- PT 优化
P13 Ray Tracing 1
- Why ray tracing?
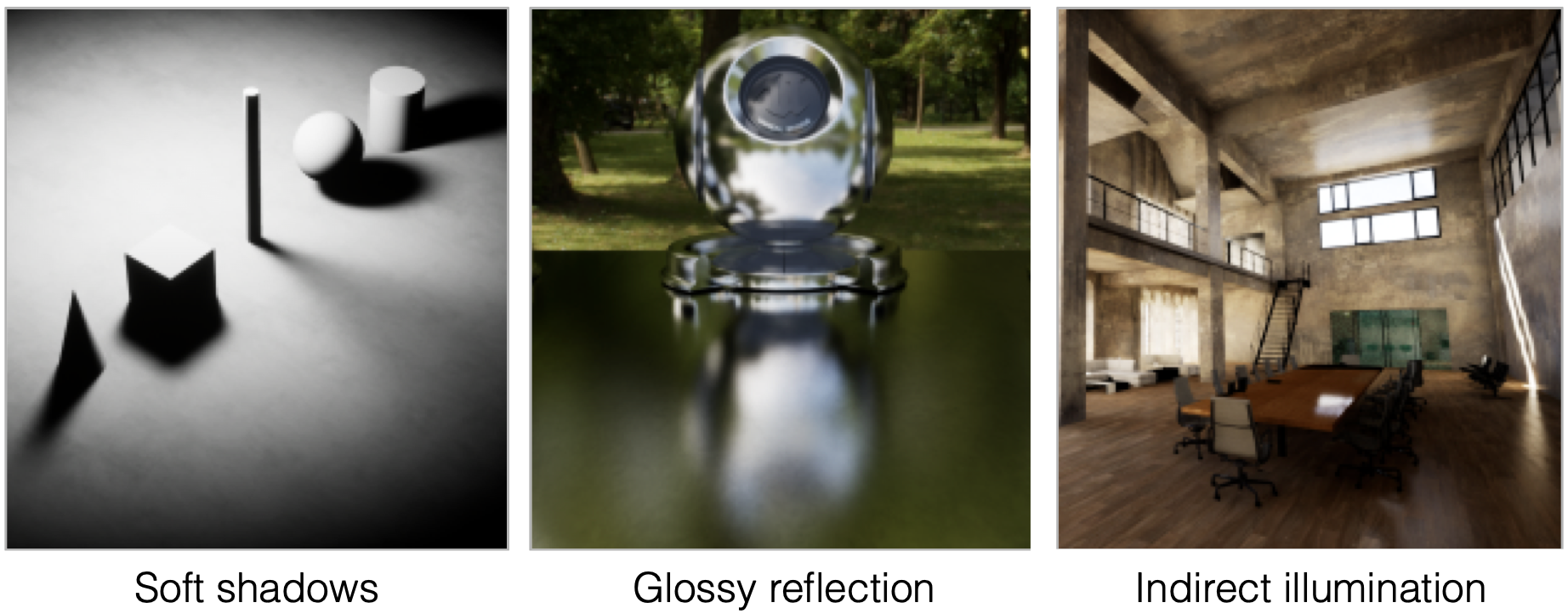
- 光栅化渲染不能完美诠释global effects(下图都算global effect)
- 光栅化速度快,可实现近似,但质量较低
- 光栅化是Real-time;光线追踪是Offline
- 光栅化渲染不能完美诠释global effects(下图都算global effect)
- Features of ray-tracing
- accurate
- slow
Basic Ray-Tracing Algorithm
Intro
- Light光线
- 光线延直线传播(本课中)
- 光线相交时不会发生碰撞(本课中)
- 光线从光源发射出,经反射、折射后进入人眼
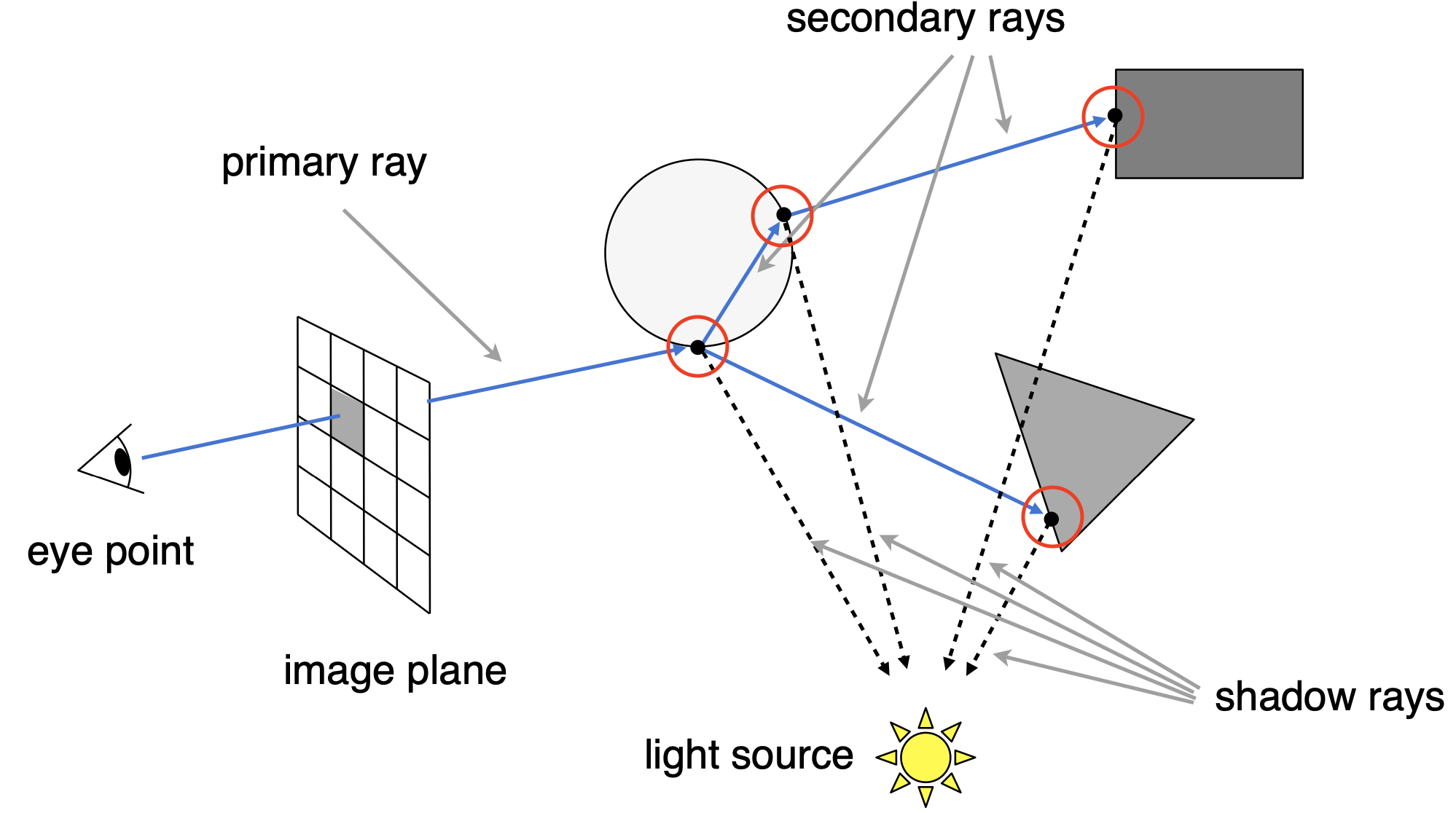
Ray Casting
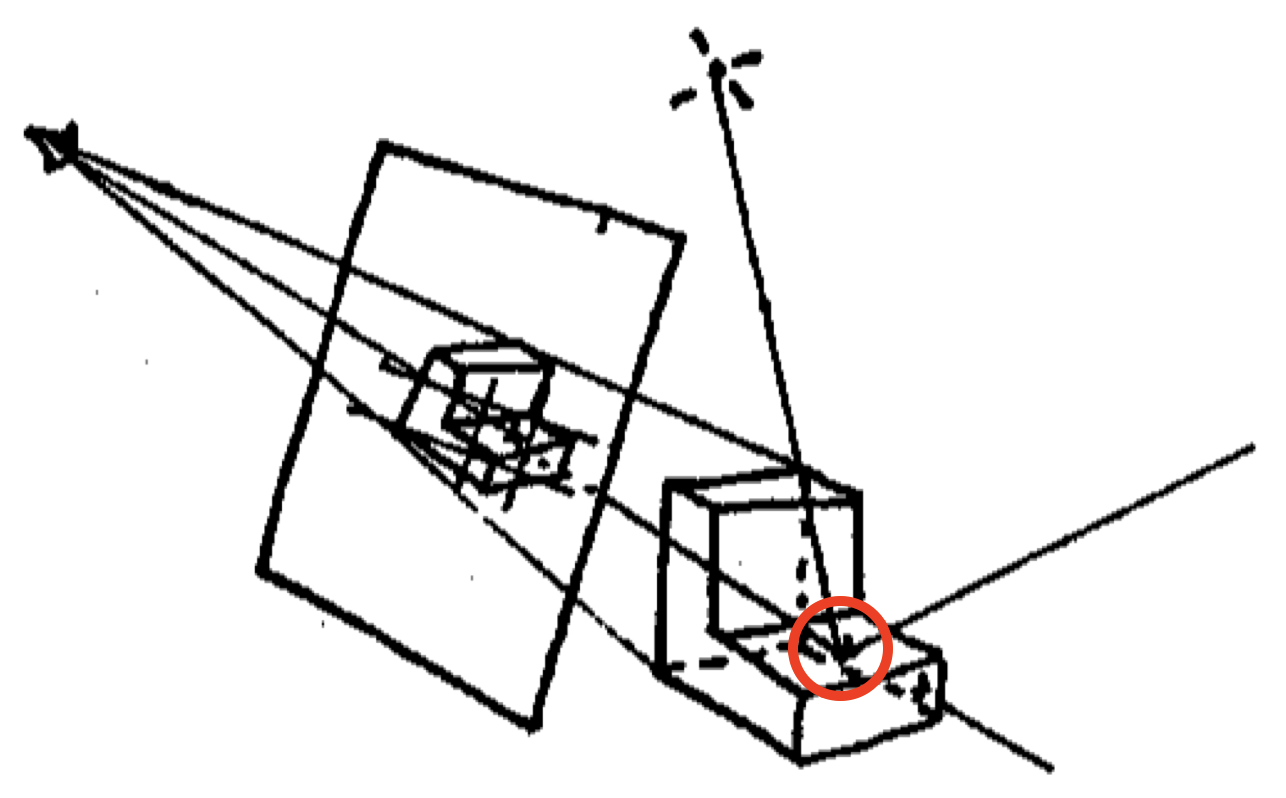
- 概述
- 摄像机与屏幕像素连线,并穿透屏幕并打在红圈处
- 连接红圈和光源,判断红圈处点是否在阴影中
- 若不在阴影中,则该光线有效,可进行进一步计算该点处光的能量
Generating Eye Rays
- Pinhole Camera Model 针孔相机模型
- Step1: 每一个像素的光线射入,与场景相交,求出最近交点
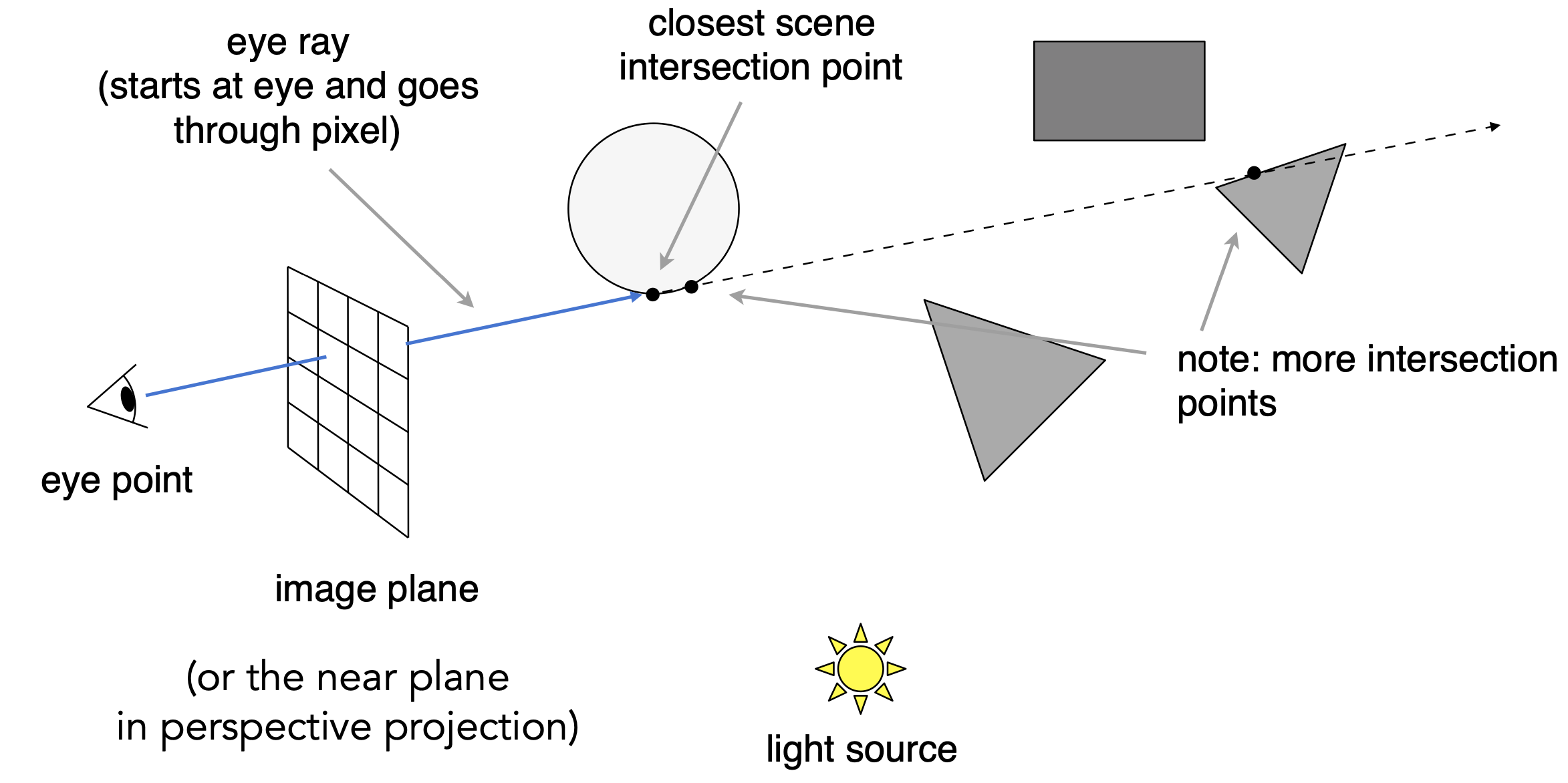
- 对于光线和多个物体相交的情况:因遮挡,只考虑最近(直接避免光追中的深度测试)
- Step2: 交点与光源连线,若不在阴影中就计算着色
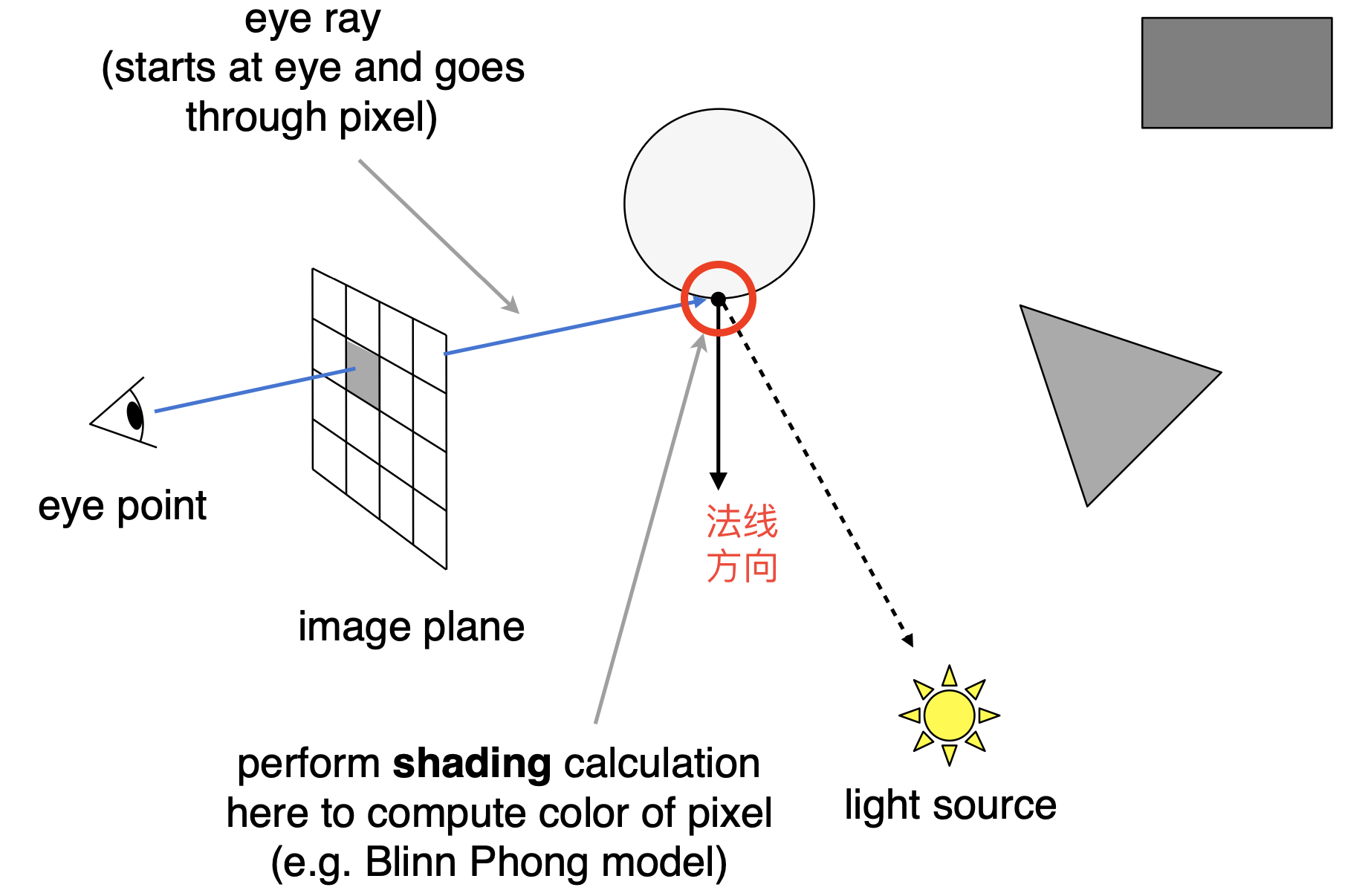
- Step3: 写入对应像素
- Step1: 每一个像素的光线射入,与场景相交,求出最近交点
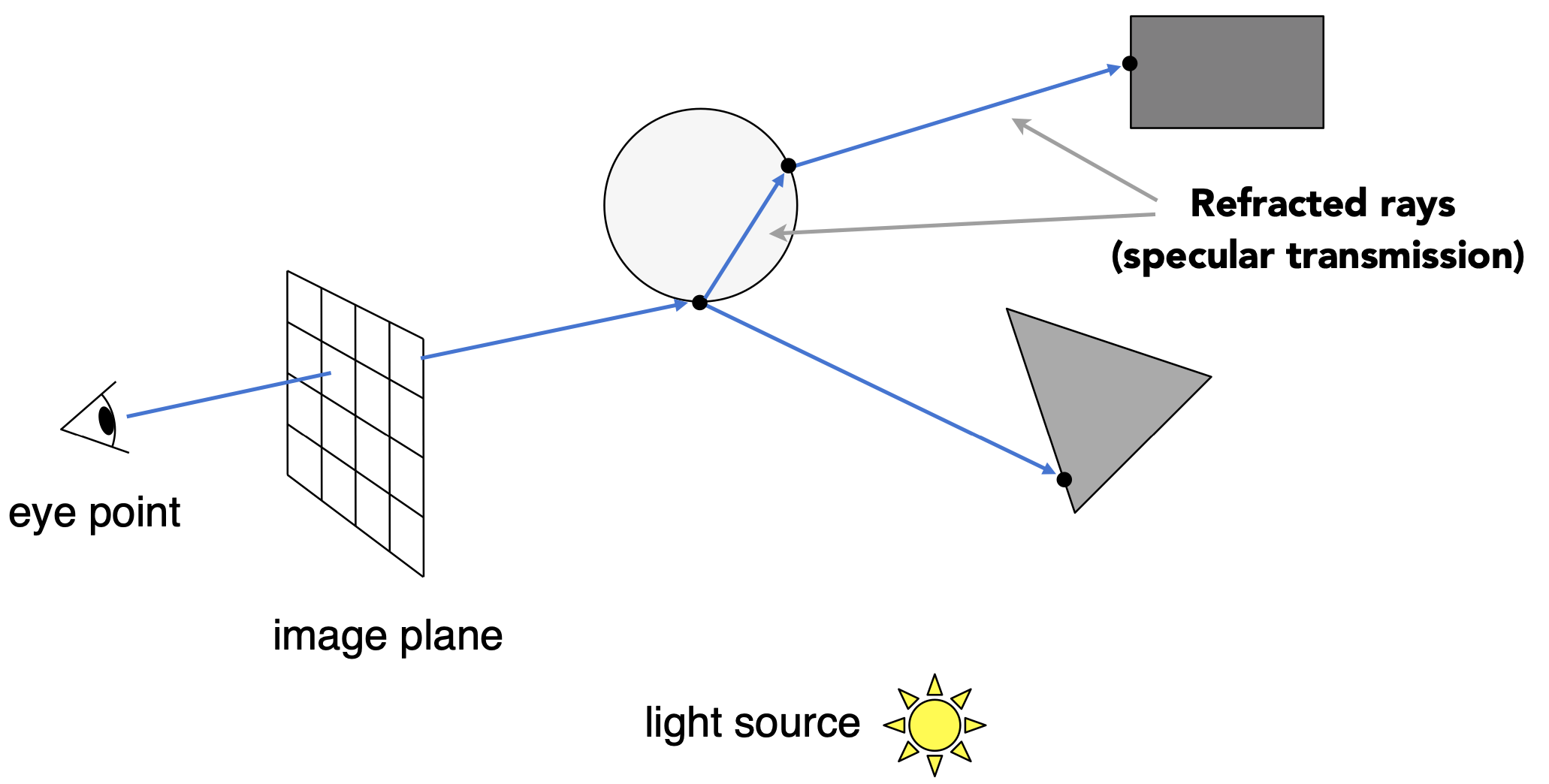
Recursive (Whitted-Style) Ray Tracing

- 对于透明物体,发生折射+反射
过程
生成眼睛到屏幕像素的primary ray
形成反射(镜面反射)or折射的多条secondary rays;若打到漫反射物体,反射/折射停止
作出shadow rays
若shadow rays未被物体遮挡,则计算对应红圈处的点的着色,相叠加,得出屏幕像素最终颜色
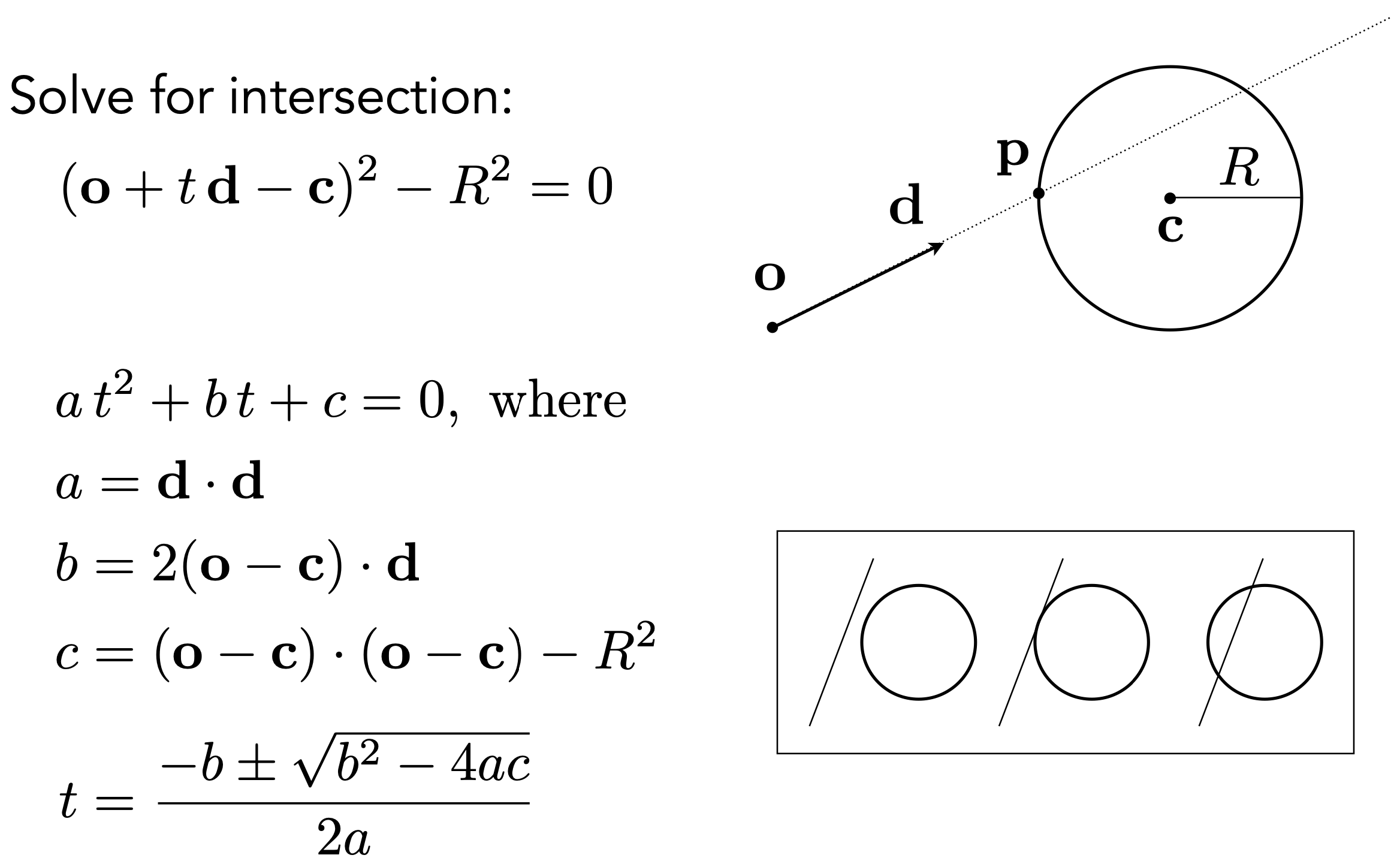
Ray-Surface Intersection 光线和面求交
光线和球体求交
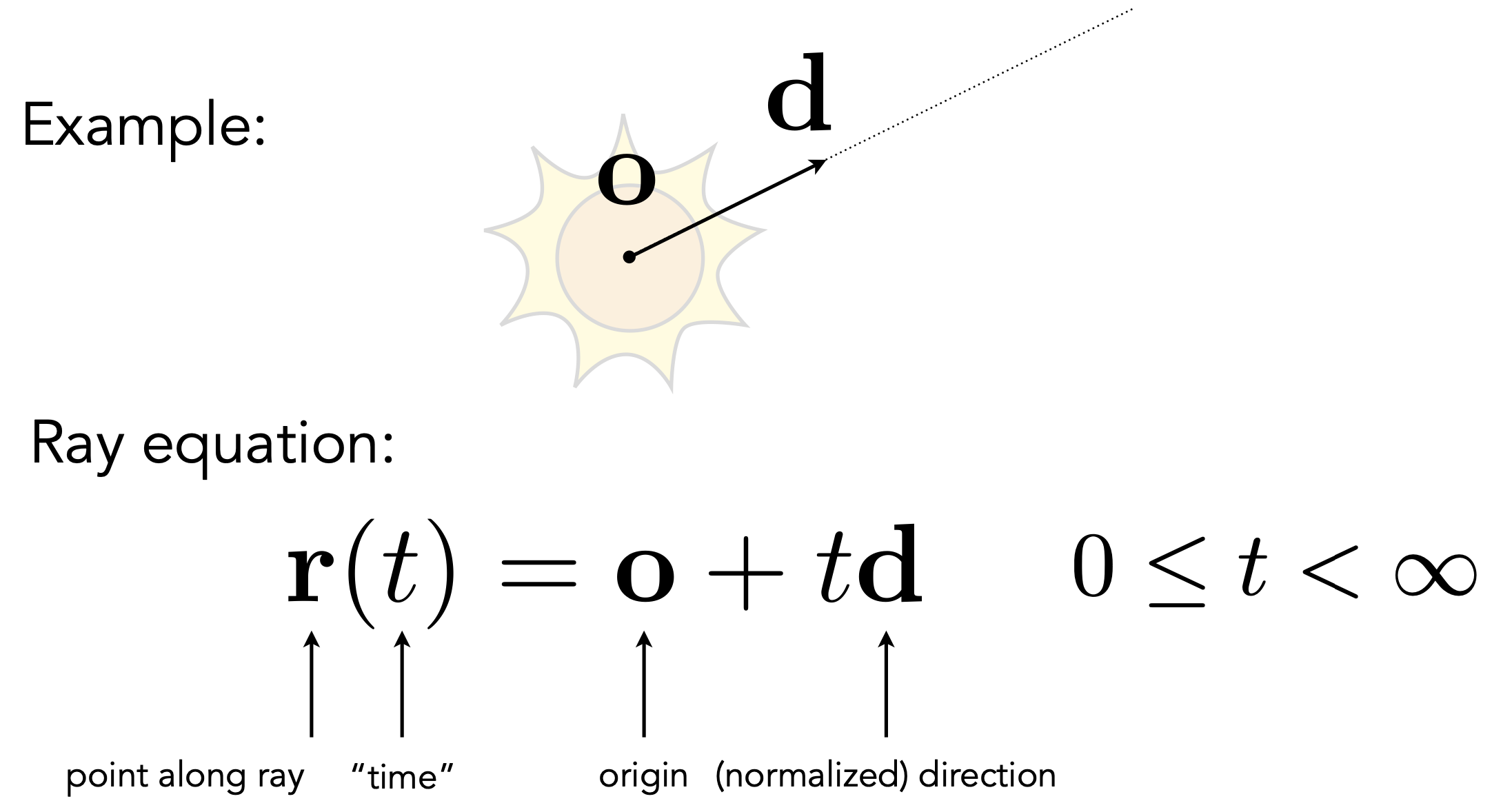
- 光线:起点+方向
- 联立方程求交点:
- 光线:$r(t) = \boldsymbol o+t \boldsymbol d , (0 \leq t < \infty)$
- 球:$\boldsymbol p: (\boldsymbol{p} -c)^2 - R^2 = 0$
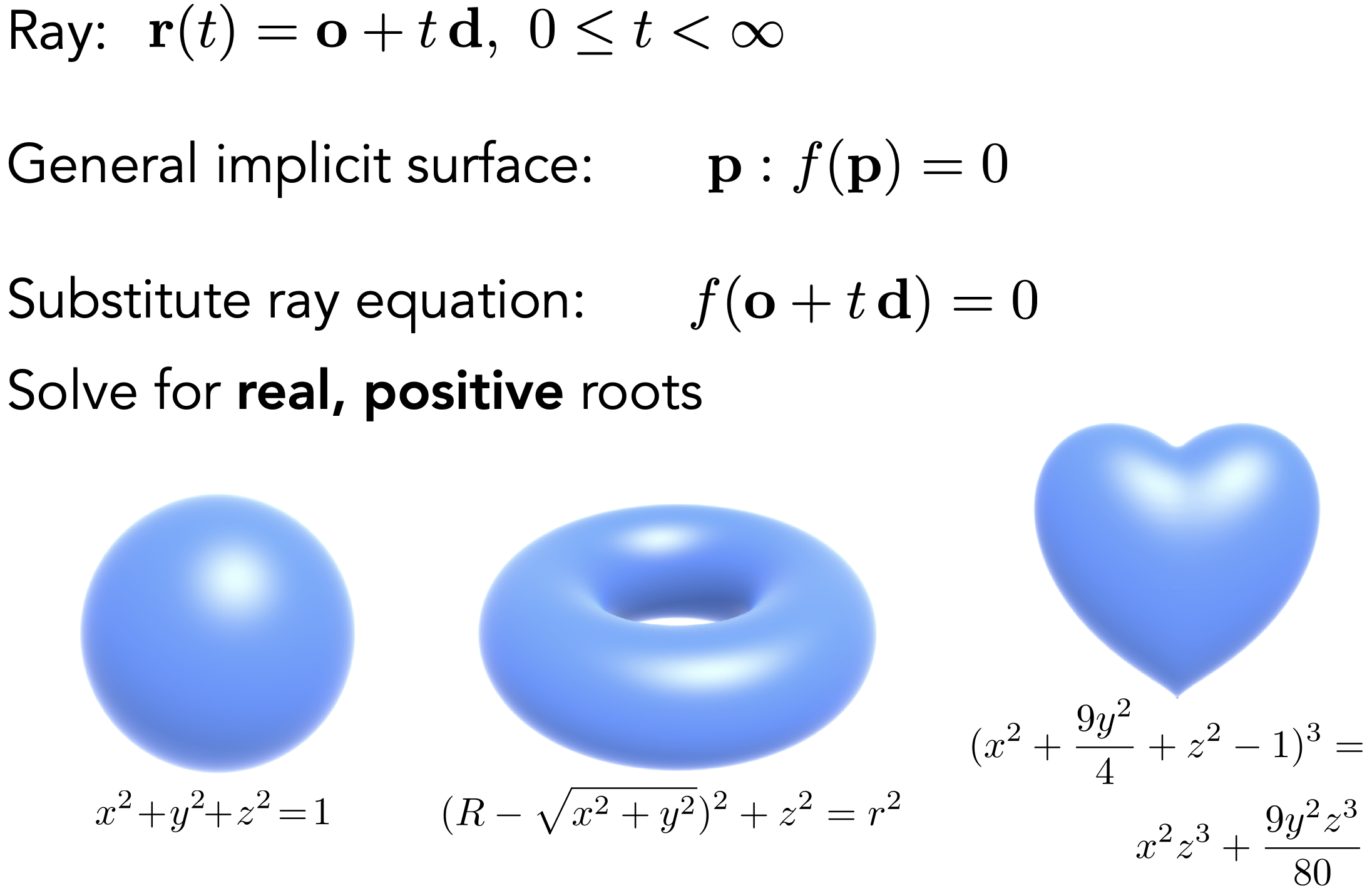
光线和隐式表面求交
- 将光线函数表示带入隐式表面公式
与三角面求交
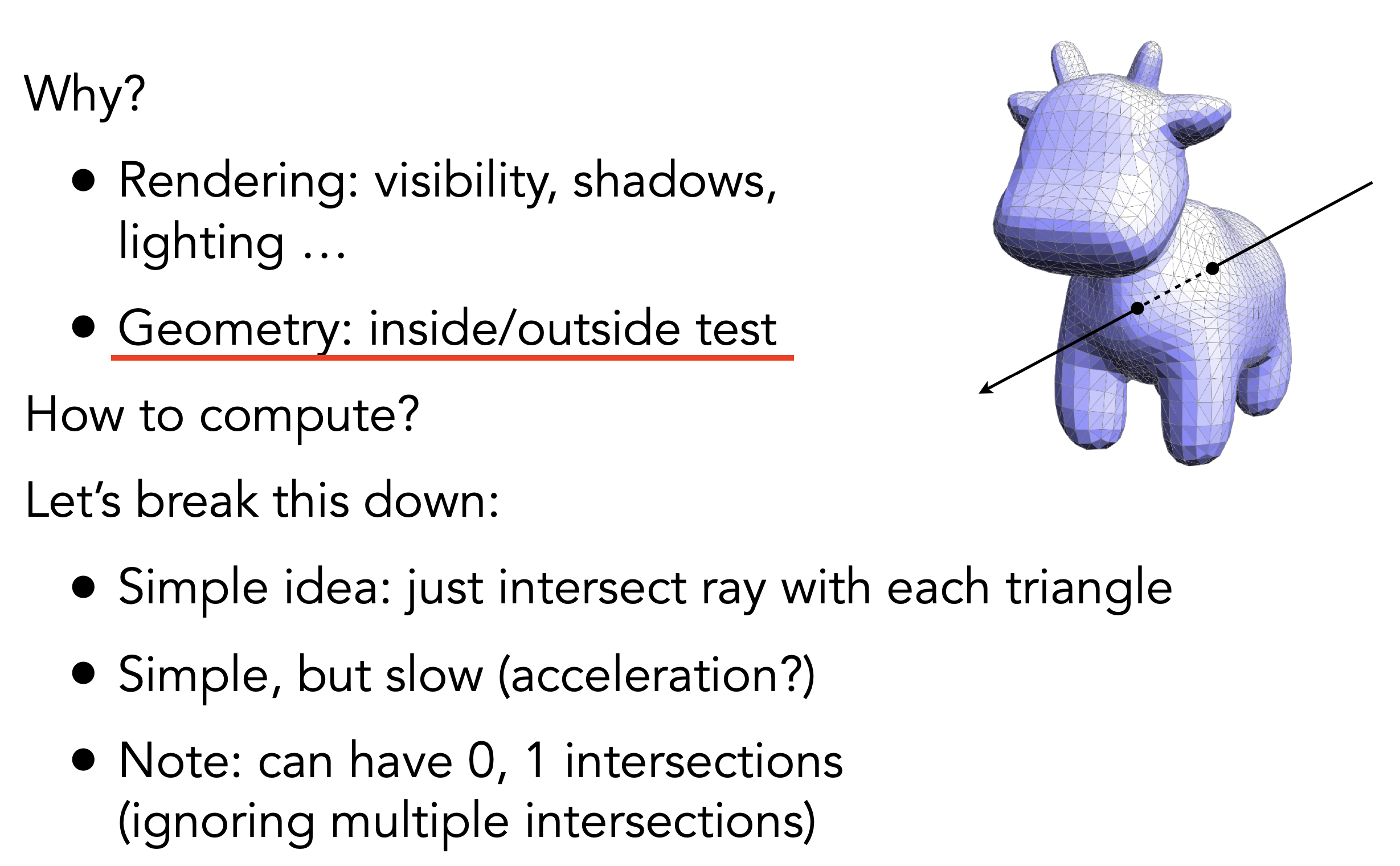
- 补:判断空间中任意点是否在(封闭)物体内:
- 从该点向任意方向做一条光线,检测光线和该物体交点个数
- 若交点为奇数,则点在物体内;若交点为偶数,则点在物体外
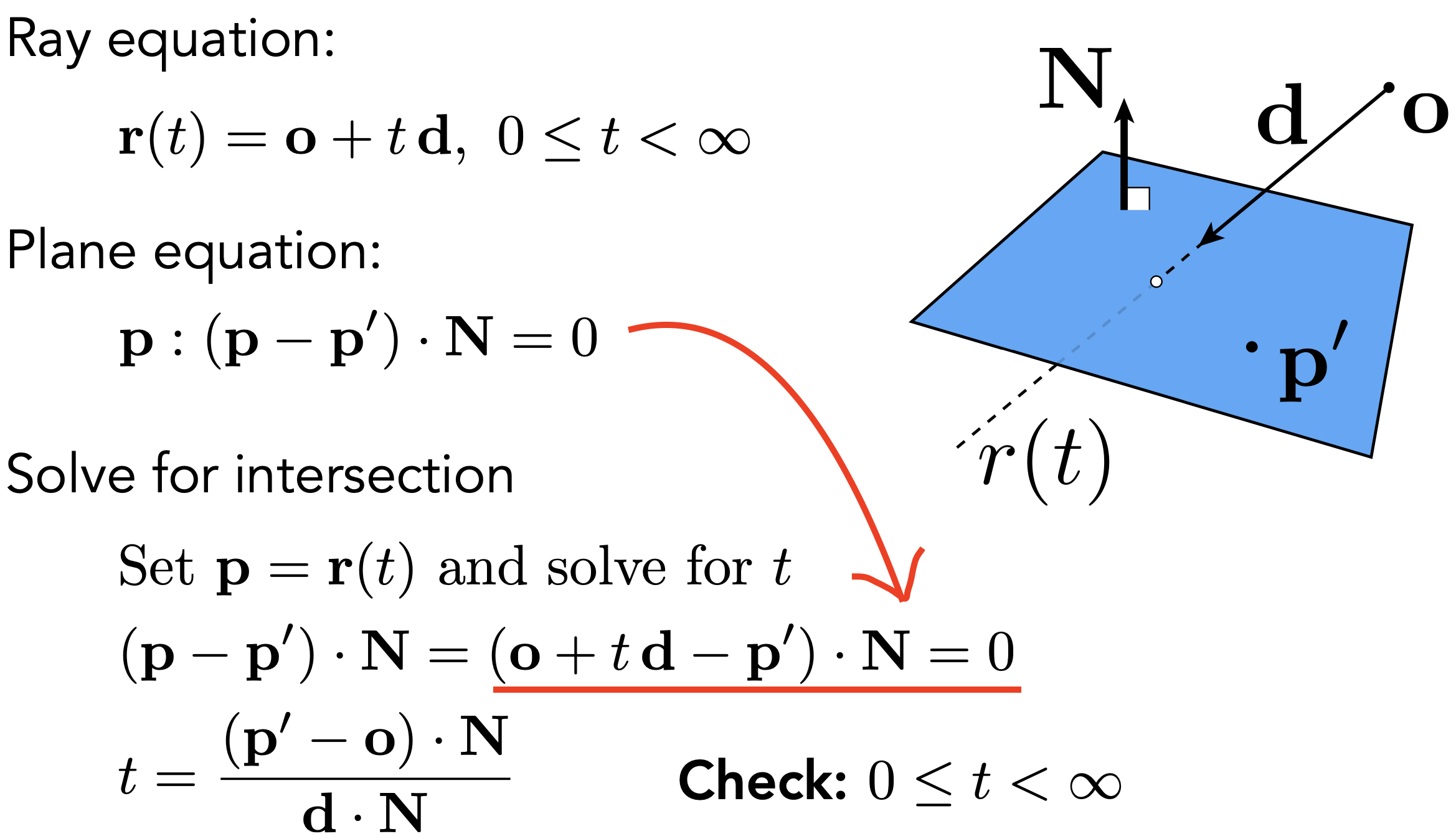
- 光线与三角面求交计算过程
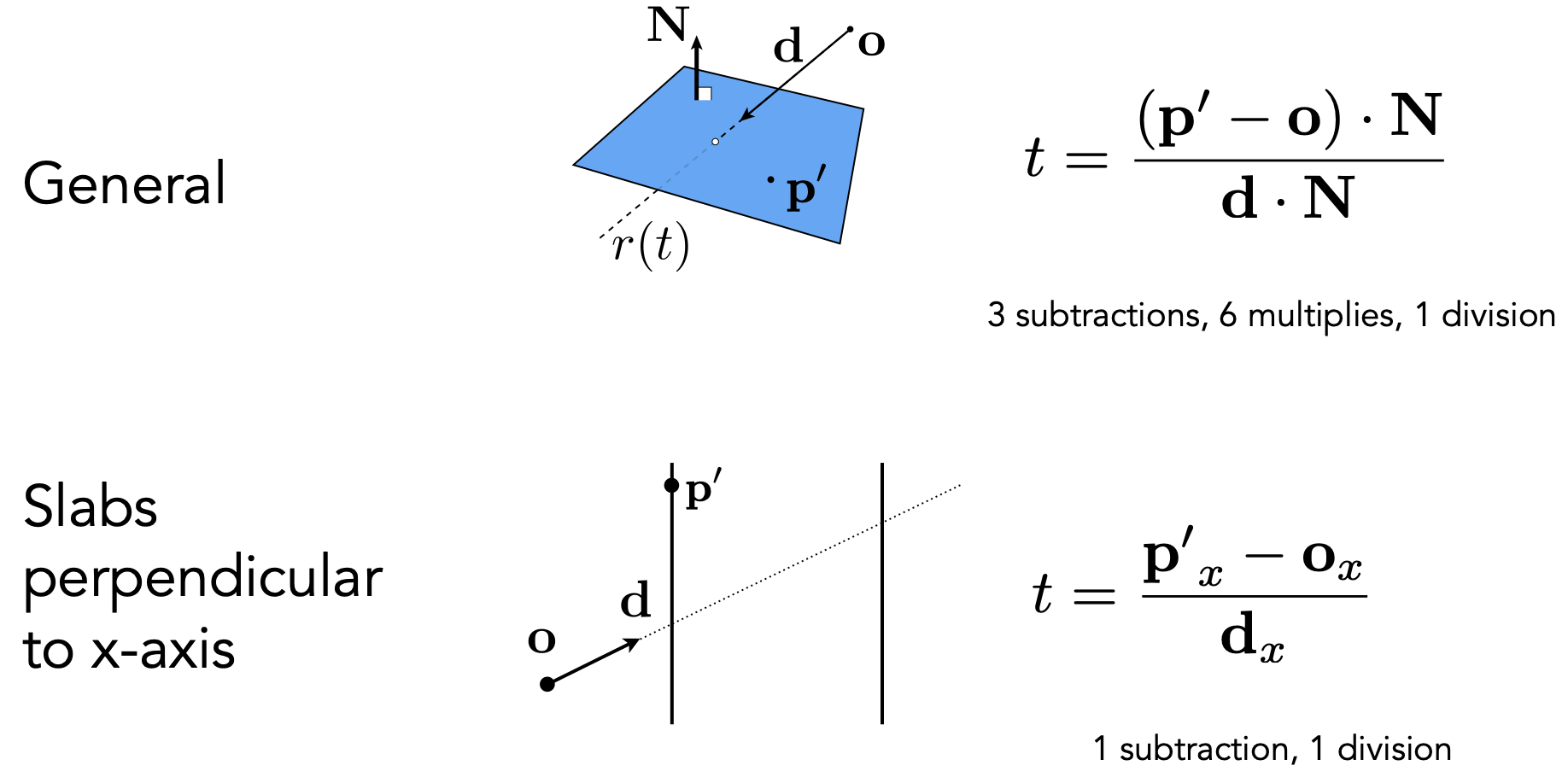
- 光线和三角形所在面求交
- 平面的定义:法向量$\boldsymbol N$+一个点$p’$
- 平面上的点$\boldsymbol p$和法线$\boldsymbol N$满足向量$\boldsymbol{p’p}\perp \boldsymbol N$,则点乘为0:

- 联立光线&平面方程求交:
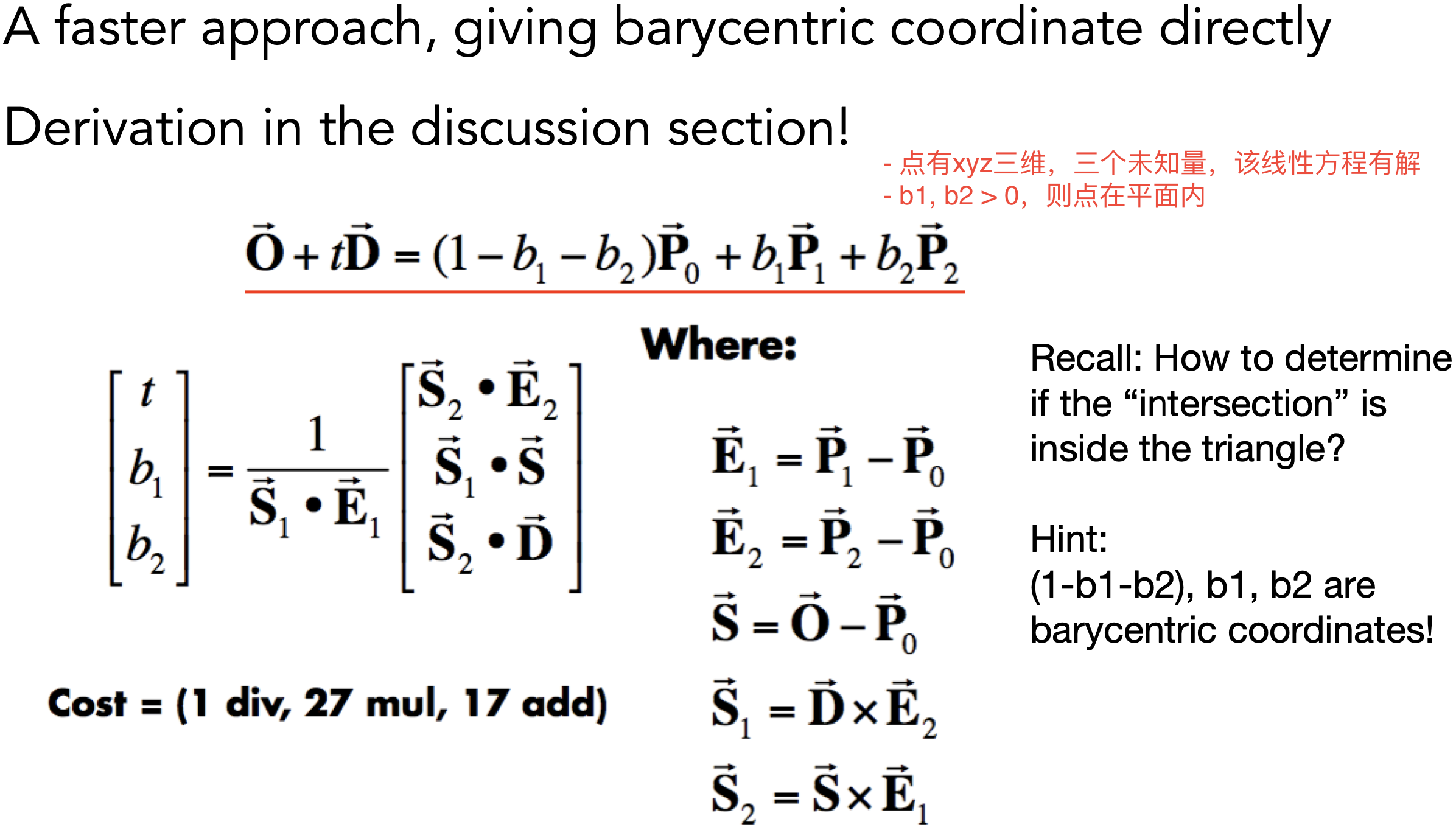
- 判断交点在不在三角形内(叉乘)
- 光线和三角形所在面求交
- Möller Trumbore Algorithm:光线方程 = 重心坐标方程(可表示三角形平面内任意一点)
缺点问题
- 测试每一个三角形与光线的交点,找到最接近的交点(即最小t)
- Naive algorithm = #pixels ⨉ # traingles,每一个像素都要遍历场景中所有三角面,慢
Accelerating Ray-Surface Intersection 加速
Ray Intersection with Axis-Aligned Box
- Bounding Volumes 包围体积(盒)
- 思路:将复杂物体用简单物体包围,若光线不与包围盒相交,则肯定不会与物体相交
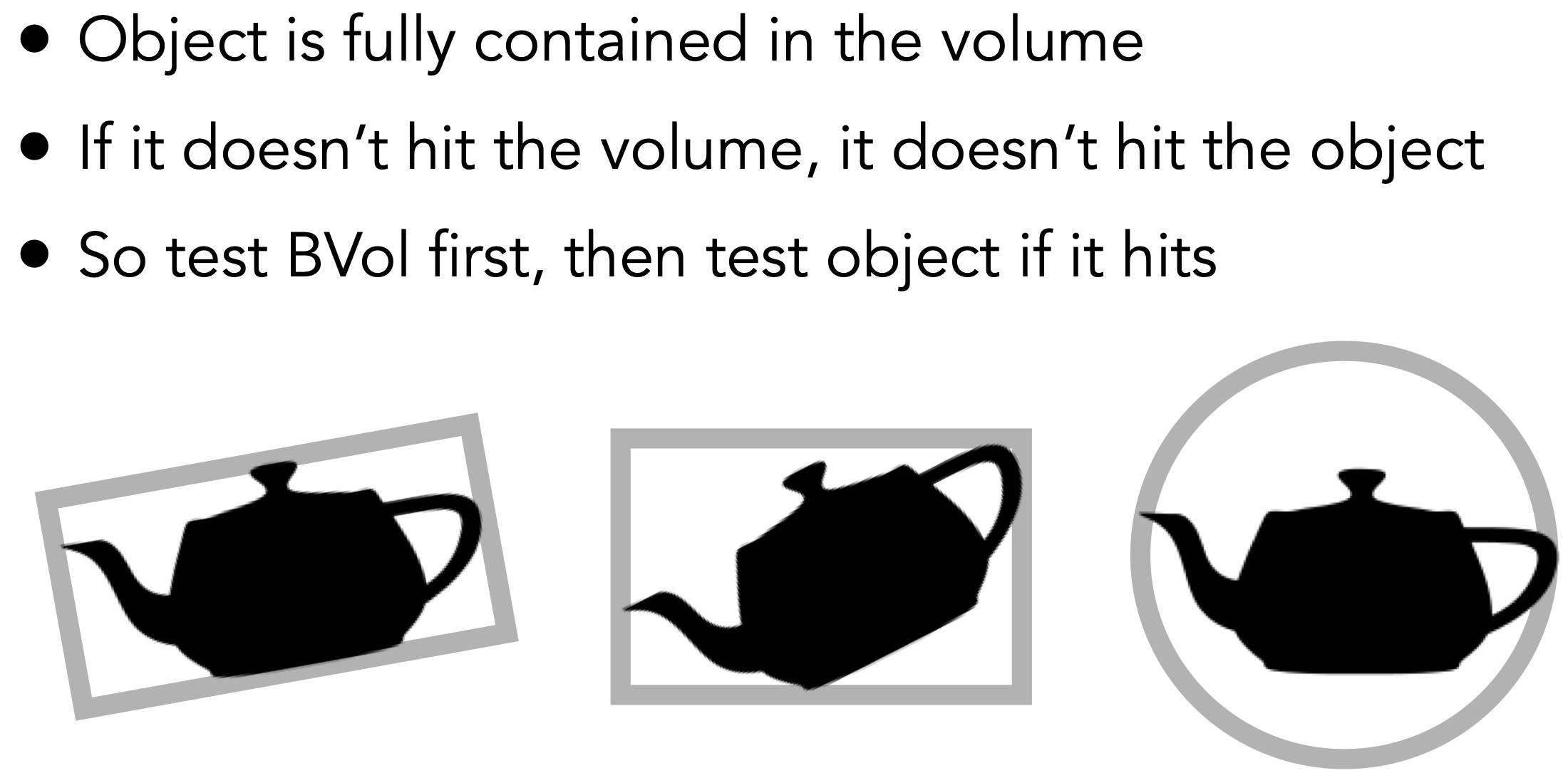
- Axis-Aligned Bounding Box (AABB 轴对⻬包围盒)
- 理解:三个对立面的交集
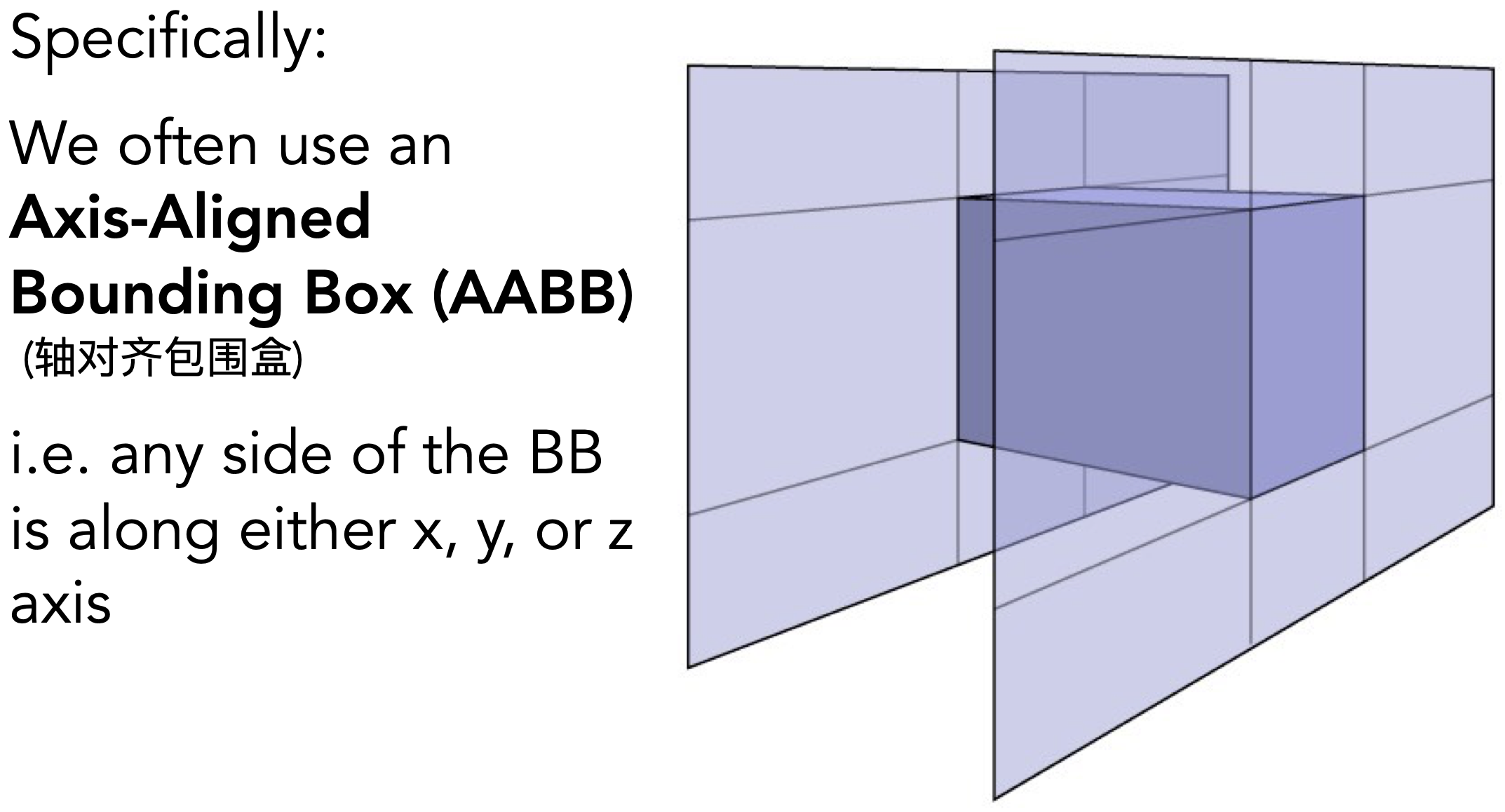
- 理解:三个对立面的交集
光线与AABB求交
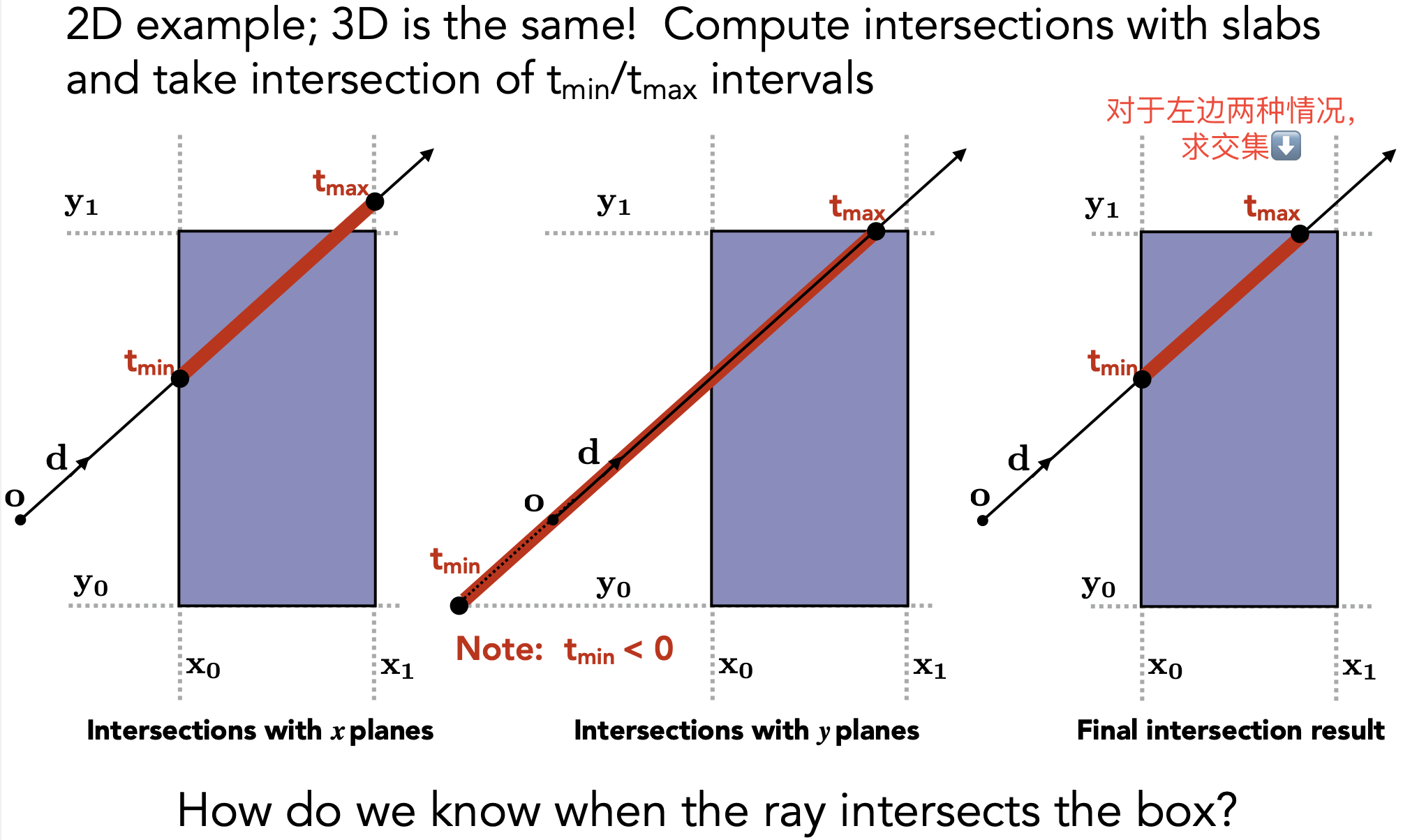
- Key Ideas
- 光线射入AABB:光线射入所有对立面
- 光线射出AABB:光线射出任意一个对立面
- 计算过程
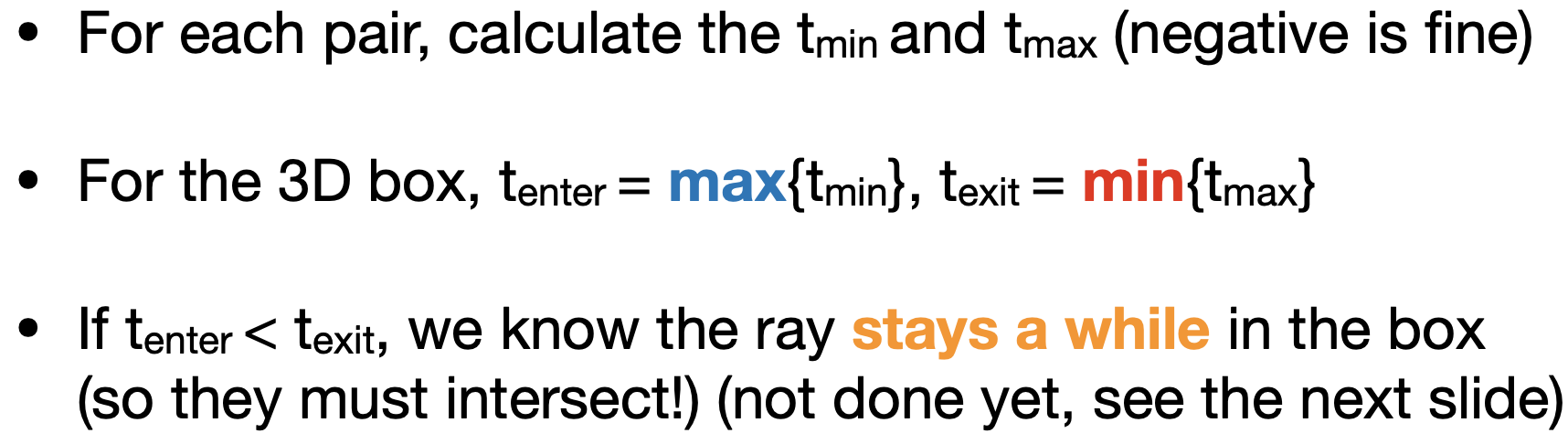
- 有交点,当且仅当$t_{enter} < t_{exit}$ && $t_{exit} >= 0$
- 若$t$为负
- $t_{exit} < 0$:AABB在光线反方向,没有交点
- $t_{enter} < 0$ && $t_{exit} >= 0$:光线起点在AABB里
Why Axis-Aligned? - 计算简单
P14&15 Ray Tracing 2&3 (Acceleration & Radiometry & BDRF & Probability)
Using AABBs to accelerate ray tracing
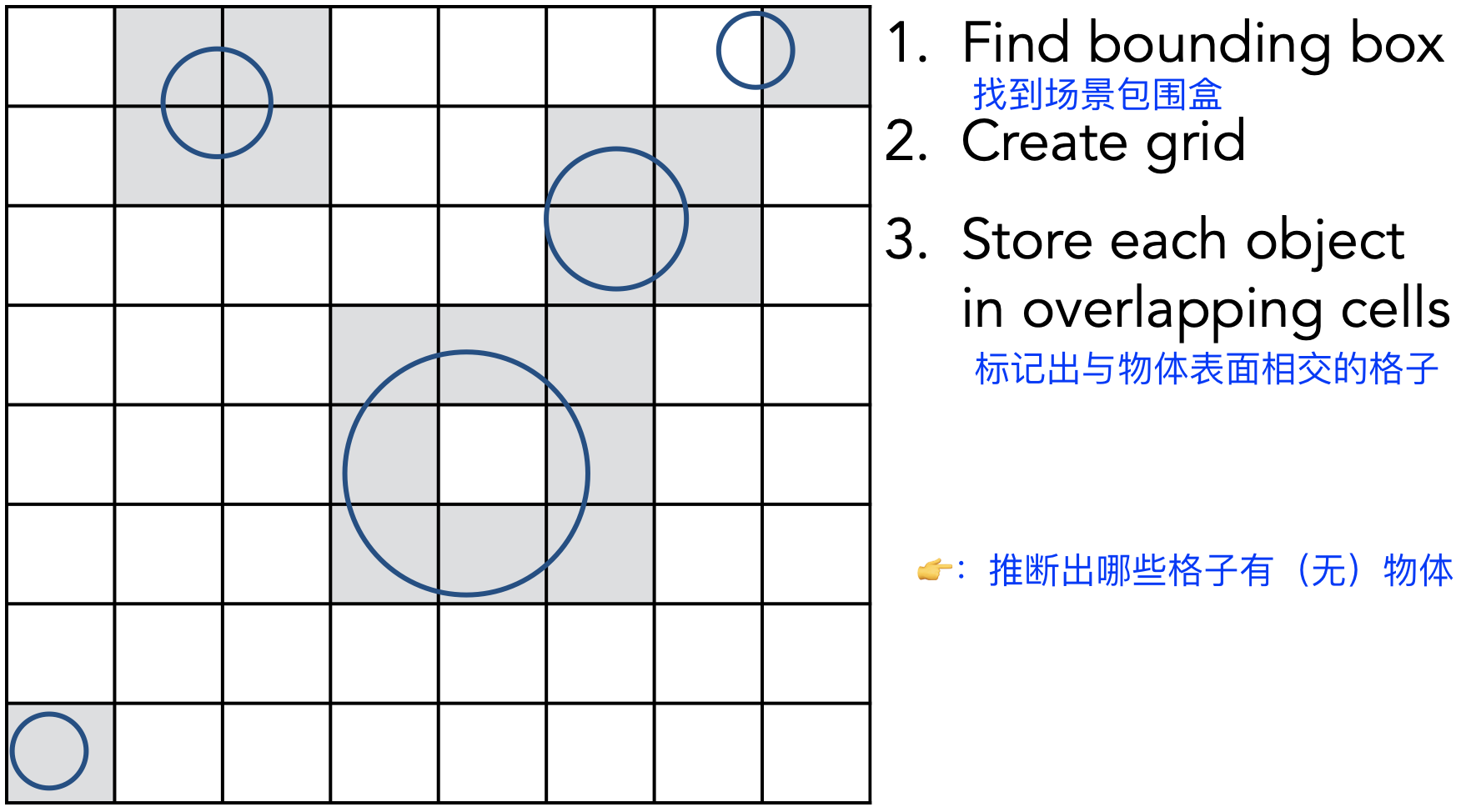
Uniform Spatial Partitions (Grids)
思路:将光线与物体求交换为光线与盒子求交
场景预处理
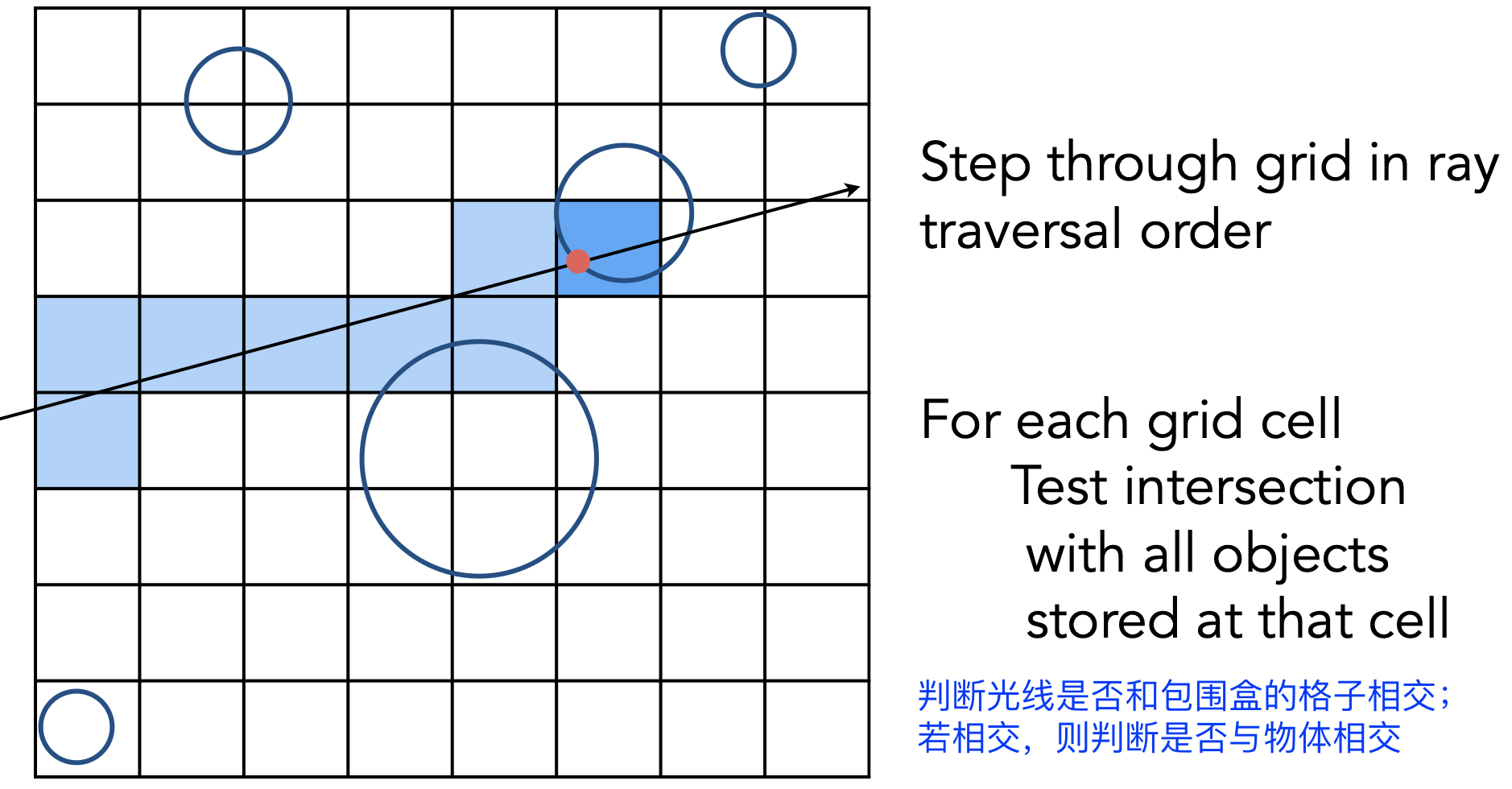
进行光线追踪
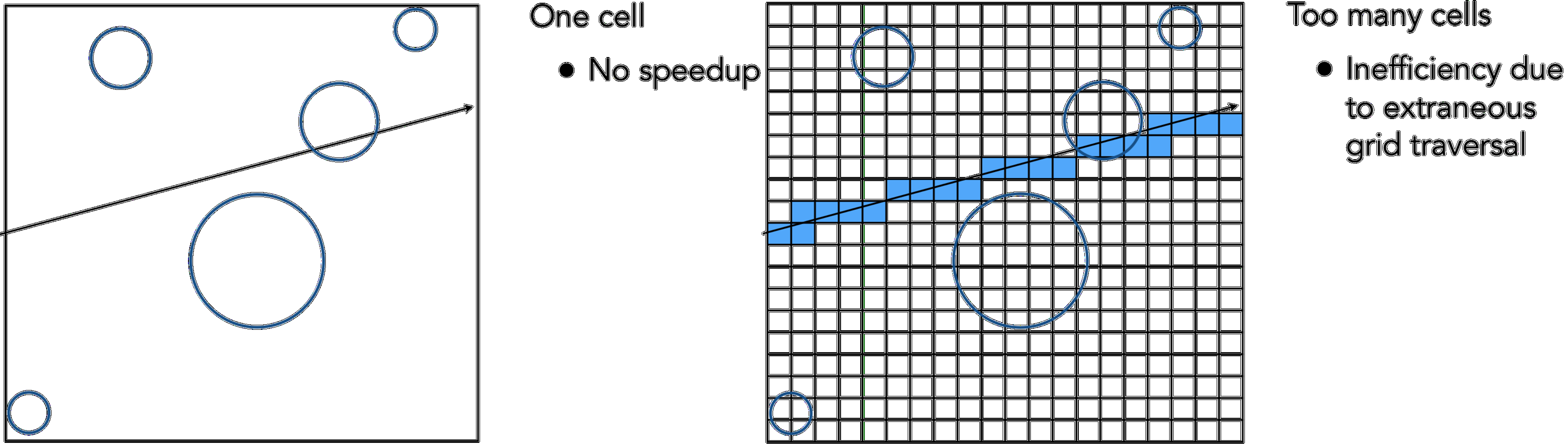
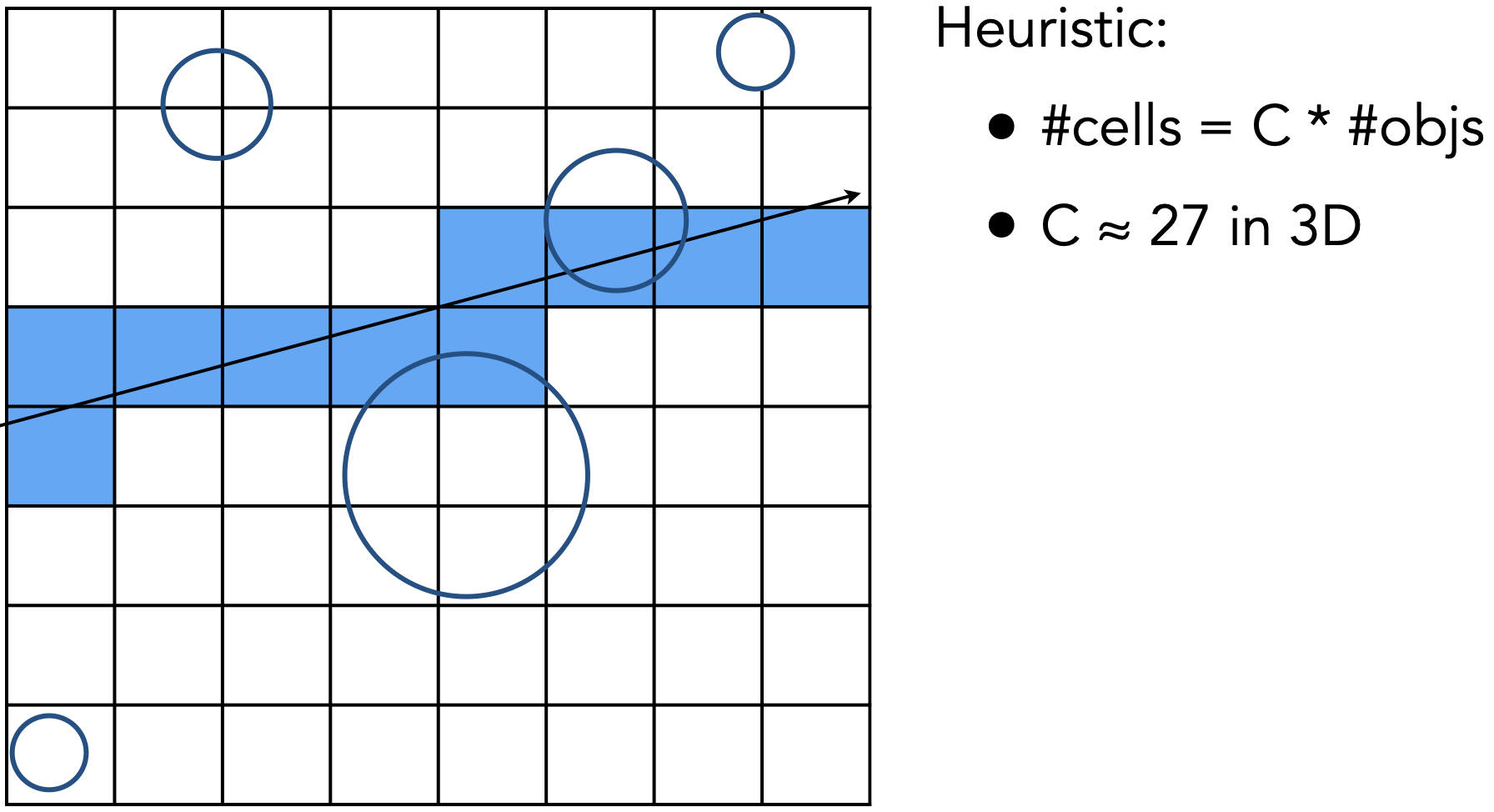
效率问题:寻找合适的格子数
Grid可以很好地处理在大小和空间上均匀分布的大量对象集合,但是(问题)
- 不适用于物体分布不均的场景,会存在“Teapot in a stadium” problem。为检测小物体则需要密集的格子,浪费性能
Spatial Partitions 空间划分(光线追踪前)
- 解决物体分布不均导致的格子需求不同的问题
- Spatial Partitioning Examples
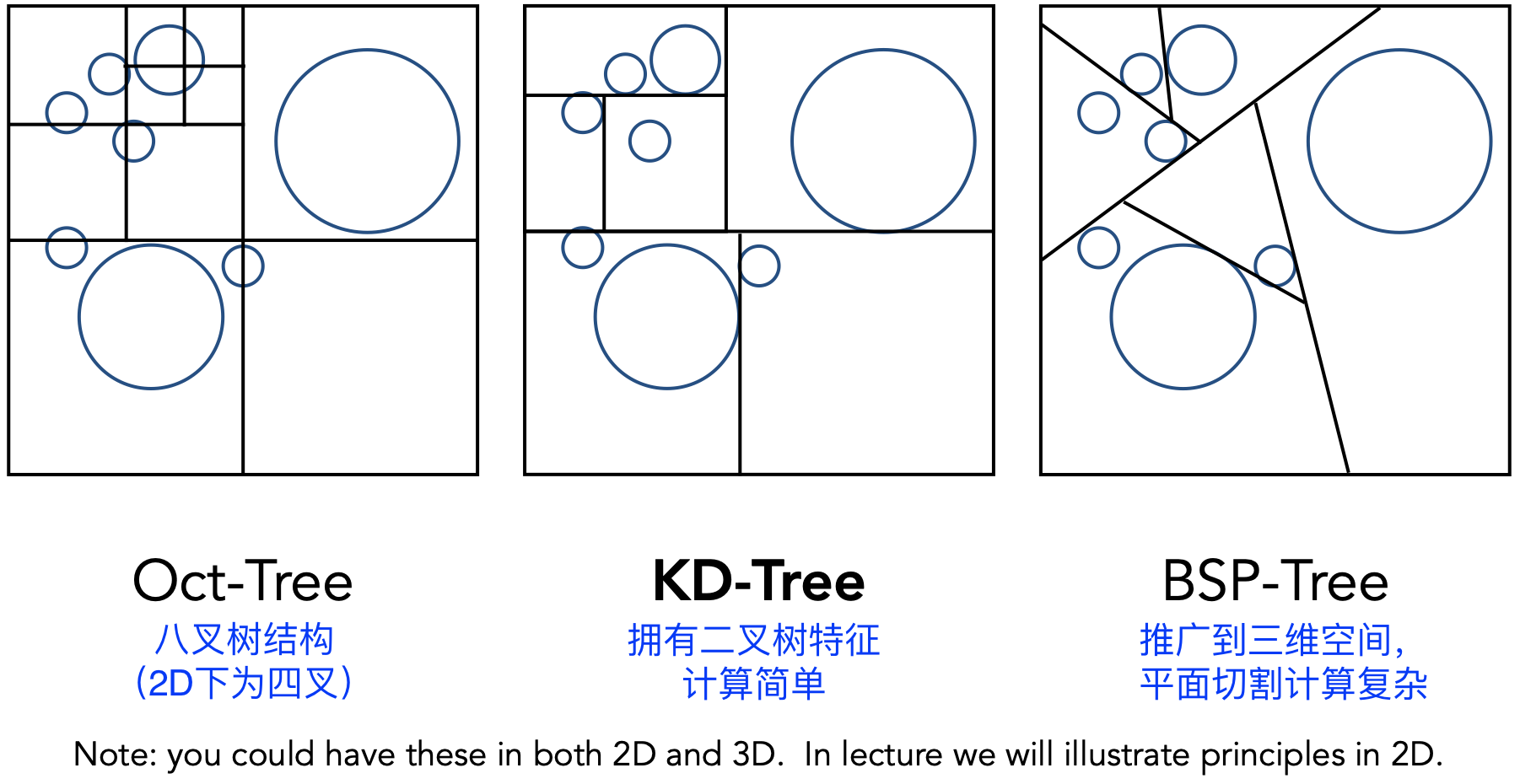
KD-Trees
(加速构造都在光追前进行)
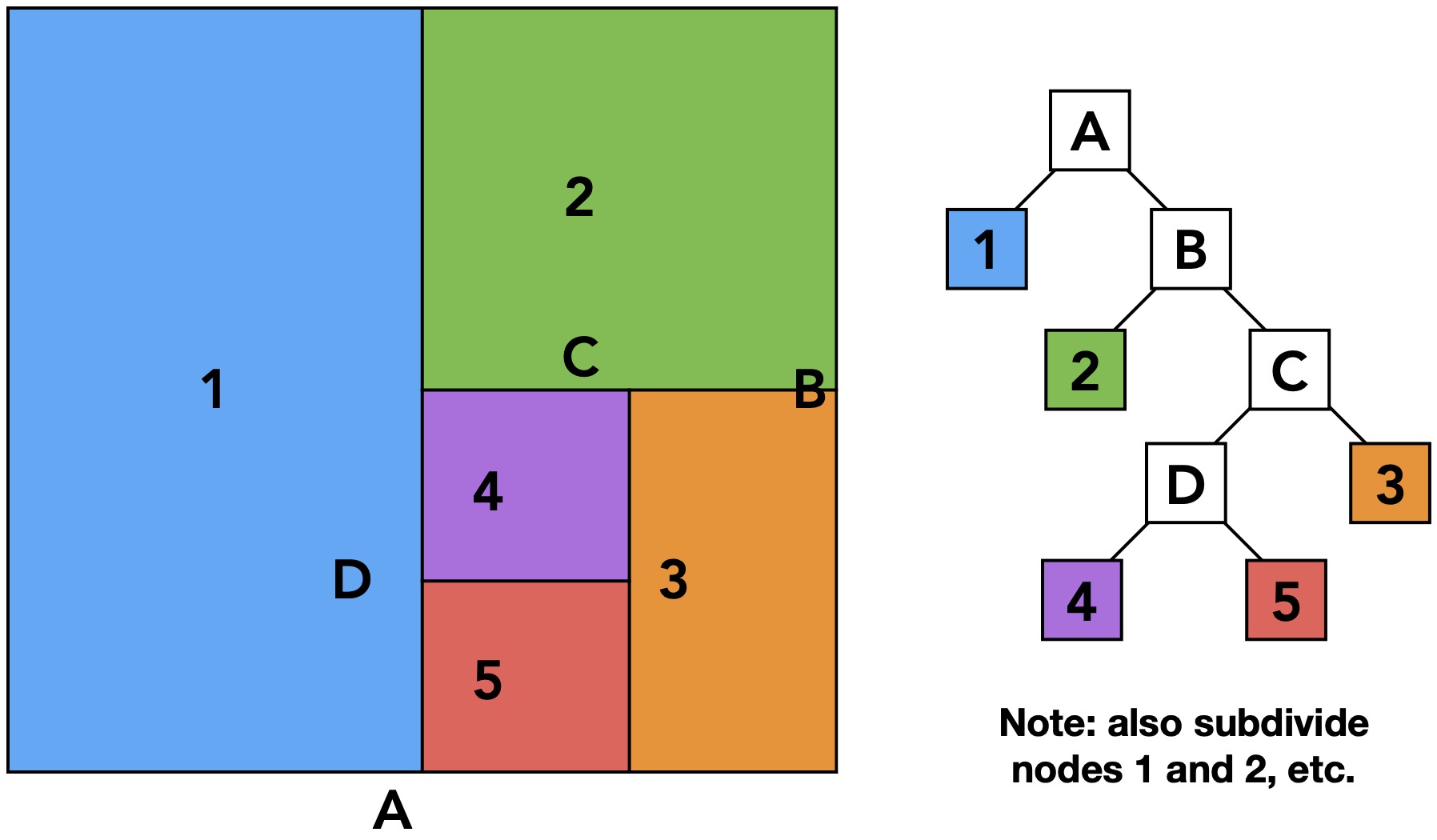
预处理:对空间进行划分,每个子空间每次只划分一次,横竖交替(1、2、3的划分在下图中省略)
- 停止划分:划分出区域与光线无交点
KD-Trees的数据结构
- Internal nodes
- 划分轴:x、y(三维还有z轴)
- 分割的位置:平面上沿轴,具体规则还需计算
- 子节点的指针
- 不存储objects(与grid相交的三角形)
- Leaf nodes:存储objects
- Internal nodes
计算过程(思路:判断光线是否与格子有交点,若无,则无后续操作;若有,则光线可能与其子节点有交点,继续划分,直到打到叶子节点,若有交点,再与叶子节点中所有三角面求交)
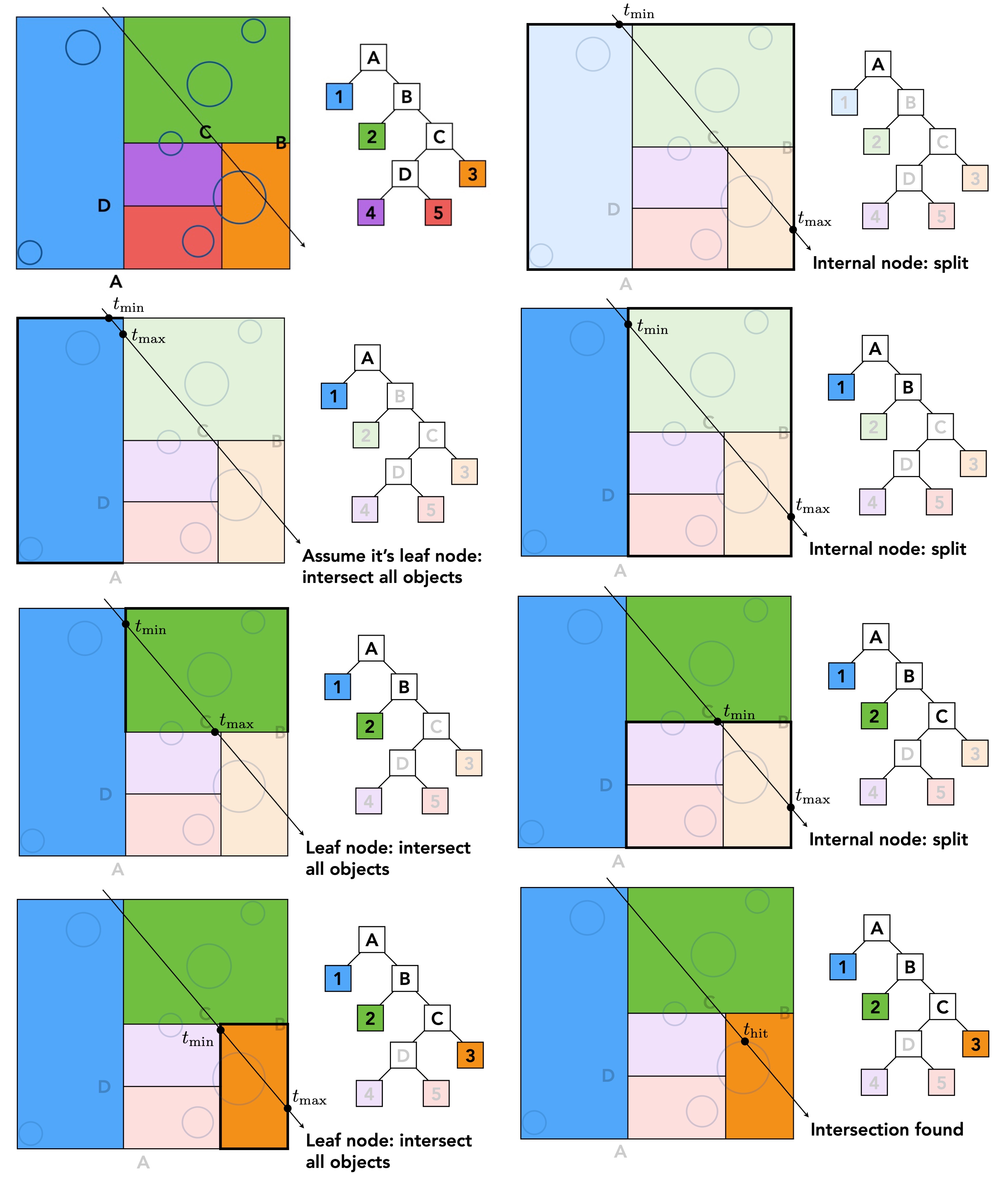
- Step1:判断光线与包围盒A相交,需对A划分
- STEP2:针对划分后A。判断光线与叶子节点1相交(这里把1、2、3看成叶子节点),则光线与1中所有object求交;判断光线与B相交,需对B划分
- STEP3:针对划分后B。判断光线与叶子节点2相交,则光线与2中所有object求交;判断光线与C相交,需对C划分
- STEP4:针对划分后C。判断光线与叶子节点3相交,则光线与3中所有object求交,这里有交点,记录$t_{hit}$;判断光线与D相交,需对D划分。
- ……
- (判断光线与5无相交,则无须再求交并划
- 缺点
- 预处理阶段,三角面与网格求交难。如三维网格题穿过三角面内部,计算结果却为无交点
- 同一个object可存储在多个叶子节点中(?)
- 补:KD-Trees缺点难解决,不怎么用了
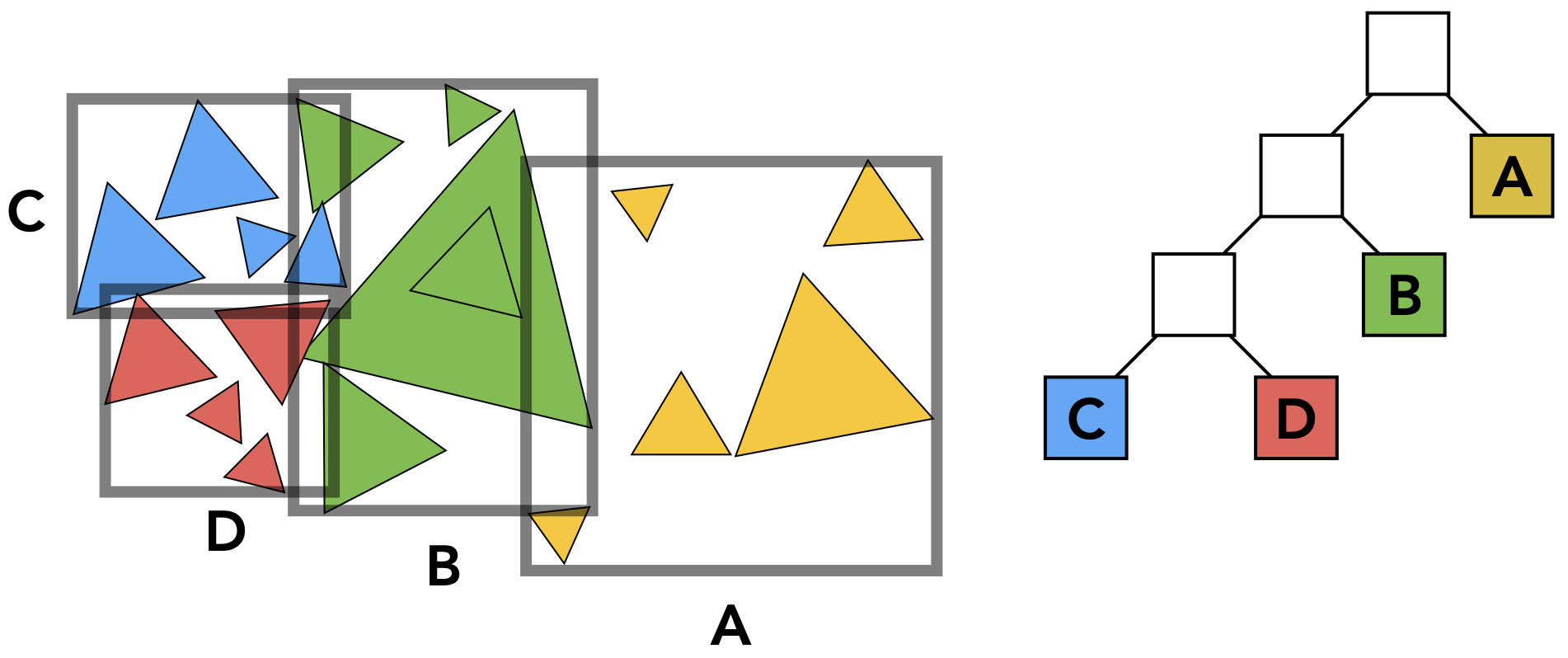
Bounding Volume Hierarchy (BVH)
(Kind of Object Partitions 一种物体划分,计算简单且效率高,应用更广泛)
思路
- 将空间中三角形分成两部分,并重计算包围盒
- 继续进行两部分的划分,停止条件根据规定or自设
特征
- 优点:解决KD-Trees缺点,一个object只会出现在一个格子里
- 缺点:包围盒有相交,存在空间冗余
过程
- 计算包围盒
- 递归地,将一个包围盒分成两部分,并同步将其内部objects也分成两部分
- 重新计算两部分的包围盒
- Stop when necessary
- 实际物体记录在叶子节点,其他节点只用于做加速结构的划分判断
如何划分
- xyz选择一个维度
- 技巧
- 选择最长的axis进行划分
- 选择中间位置的object进行划分,确保两部分object数量接近平衡(快速排序,补数据结构)
- stop when node contains few elements
BVHs的数据结构
- Internal nodes store
- Bounding box
- 子节点的指针,不存储objects
- Leaf nodes store
- Bounding box
- List of objects
- Internal nodes store
计算光线与BVH相交的过程
Intersect(Ray ray, BVH node) { if (ray misses node.bbox) return; if (node is a leaf node) test intersection with all objs; return closest intersection; // 递归 hit1 = Intersect(ray, node.child1); hit2 = Intersect(ray, node.child2); return the closer of hit1, hit2; }

Spatial vs Object Partitions
- Spatial partition (e.g.KD-tree)
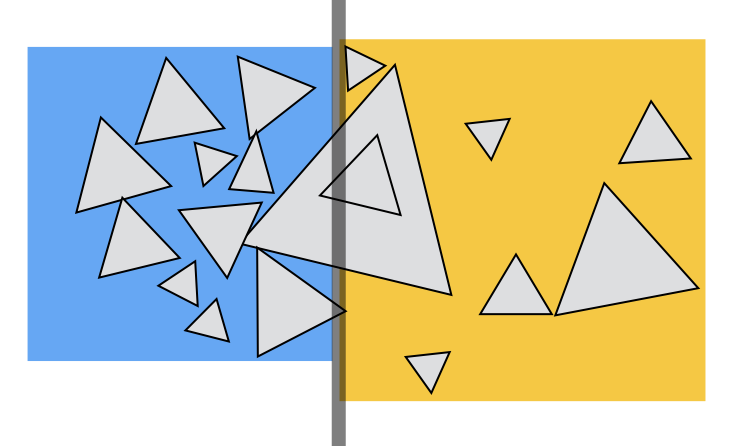
- 划分区域在空间上不相交
- 一个object可能被划分进多个子节点
- Object partition (e.g. BVH)
- Bounding box在空间上可能重叠
- object不会出现在多个包围盒中,也不用计算object和包围盒如何相交
- Spatial partition (e.g.KD-tree)
Basic radiometry 辐射度量学
(Whitted style ray tracing 并不是真实的基于物理的结果,引入了大量的完美假设,同时有很多错误的估计。而辐射度量学是精确的定义光线与物体的交互,进行真实的物理模拟。)
Radiometry
新的概念:Radiant flux(power) 辐射通量 / intensity强度 / irradiance照度 / radiance
Radiant Energy $Q$ and Flux(Power) $\Phi$
- Radiant energy $Q$:辐射能,是电磁辐射的能量,辐射通量对时间的积分。单位 $J$ 焦耳
Radiant flux(power):辐射通量or功率,是单位时间内释放、反射、投射或吸收的能量,简单理解可认为该值说明一个光源有多亮。单位流明$lm$ / 瓦特$W$。计算公式:$\Phi = \frac{dQ}{dt}$
Important Light Measurements of Interest
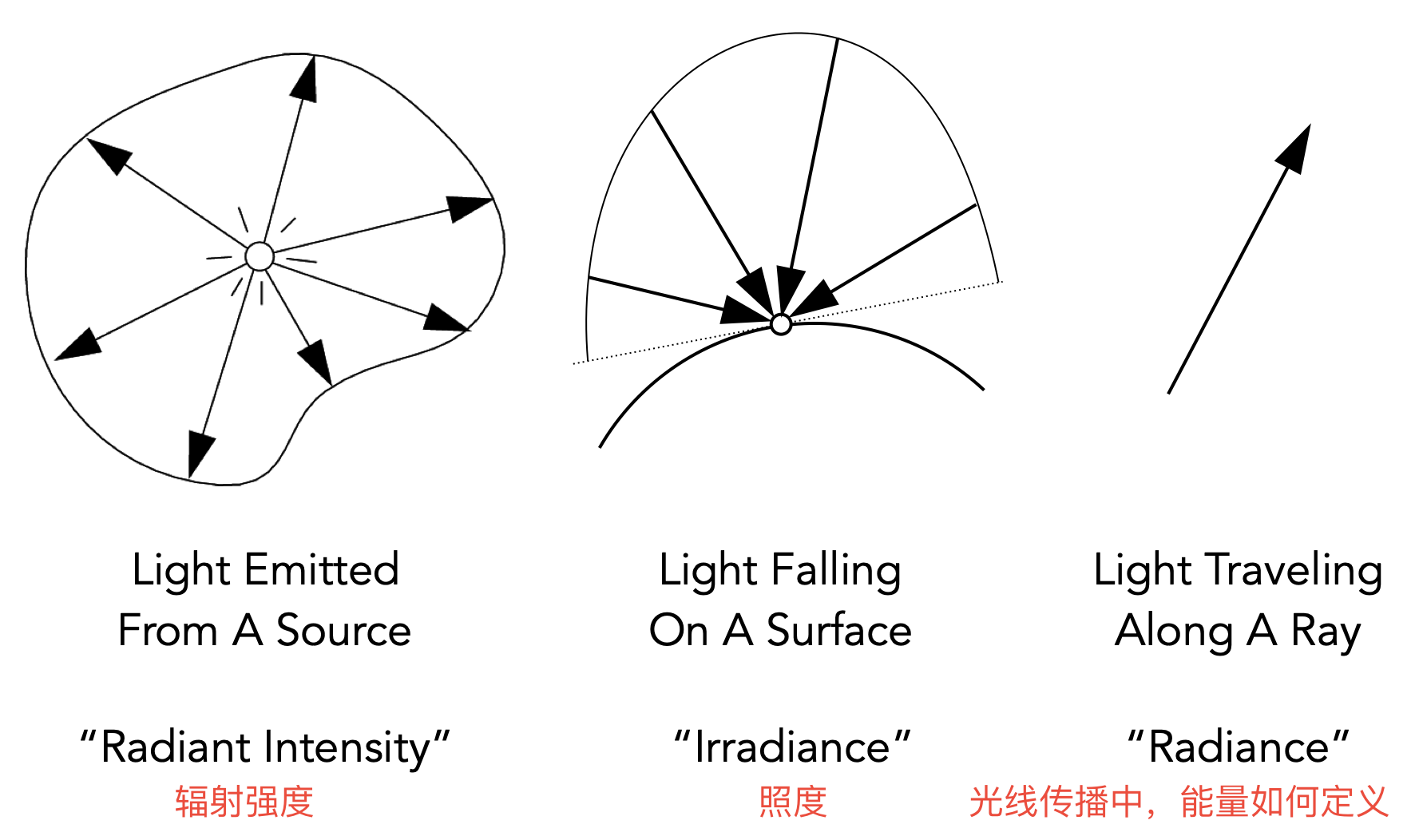
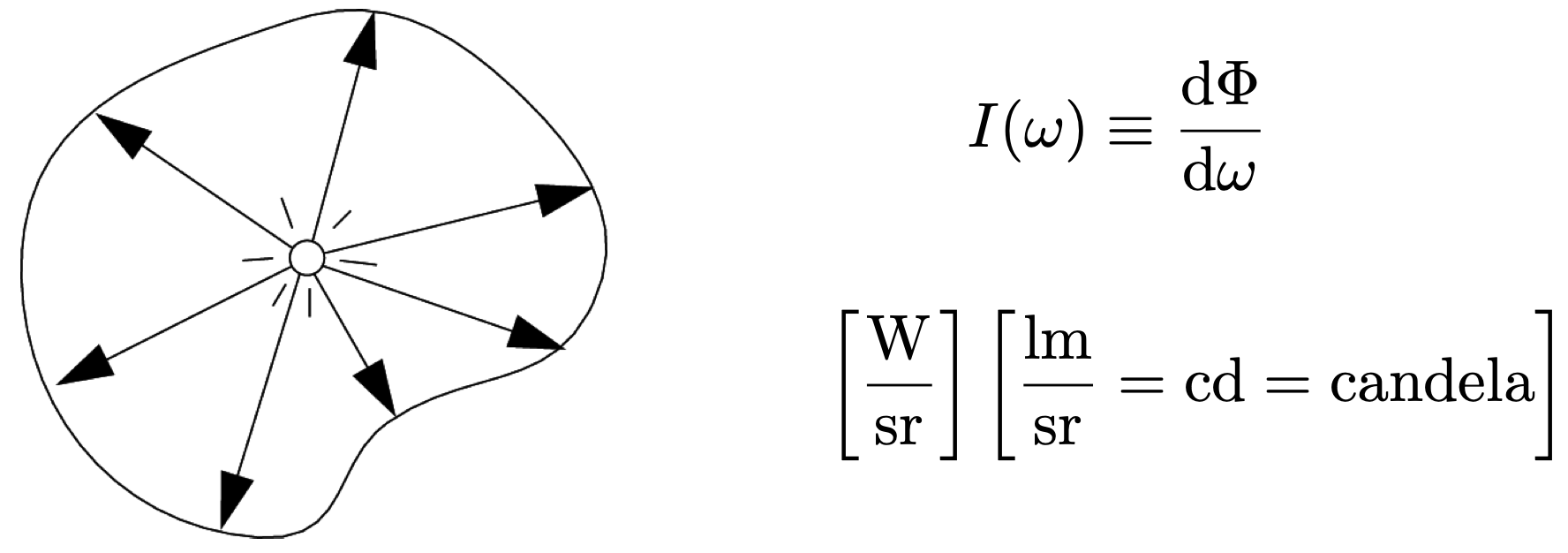
Intensity $I$
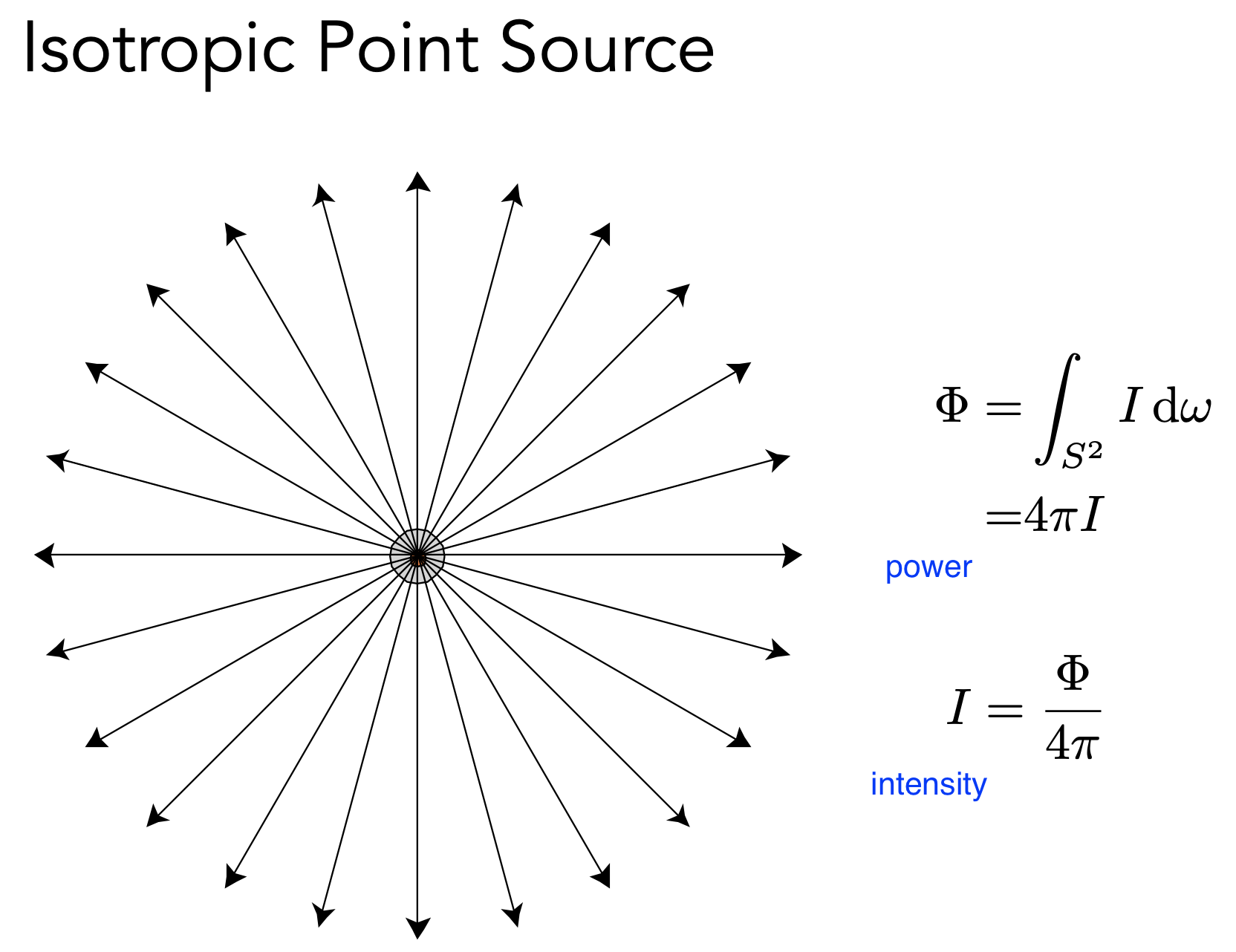
- Intensity:辐射强度,单位立体角所包含的辐射通量/功率(针对立体角的方向上)。单位是 $cd$ 坎德拉
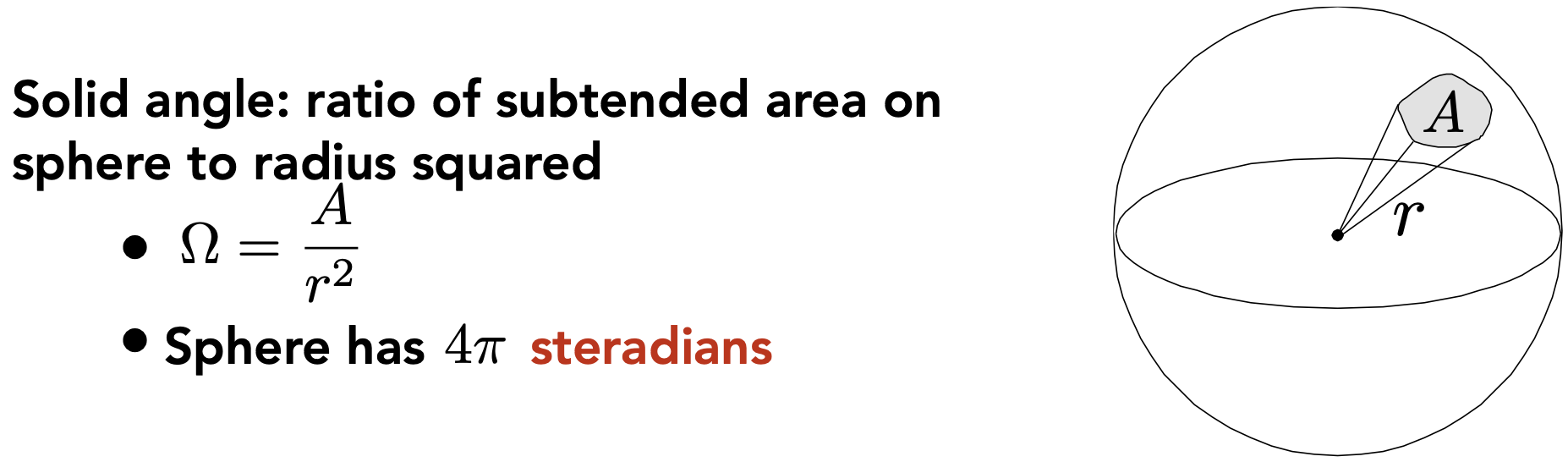
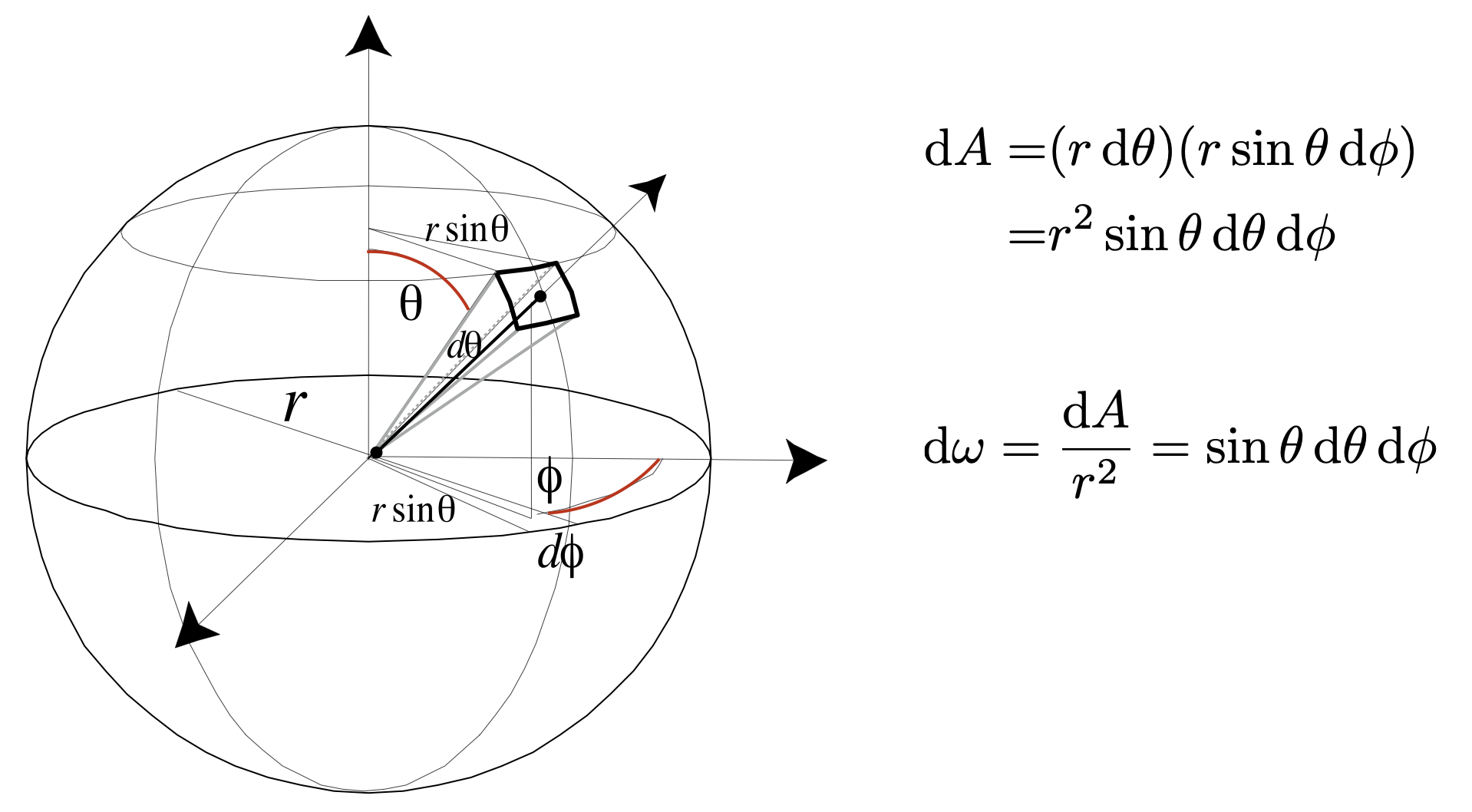
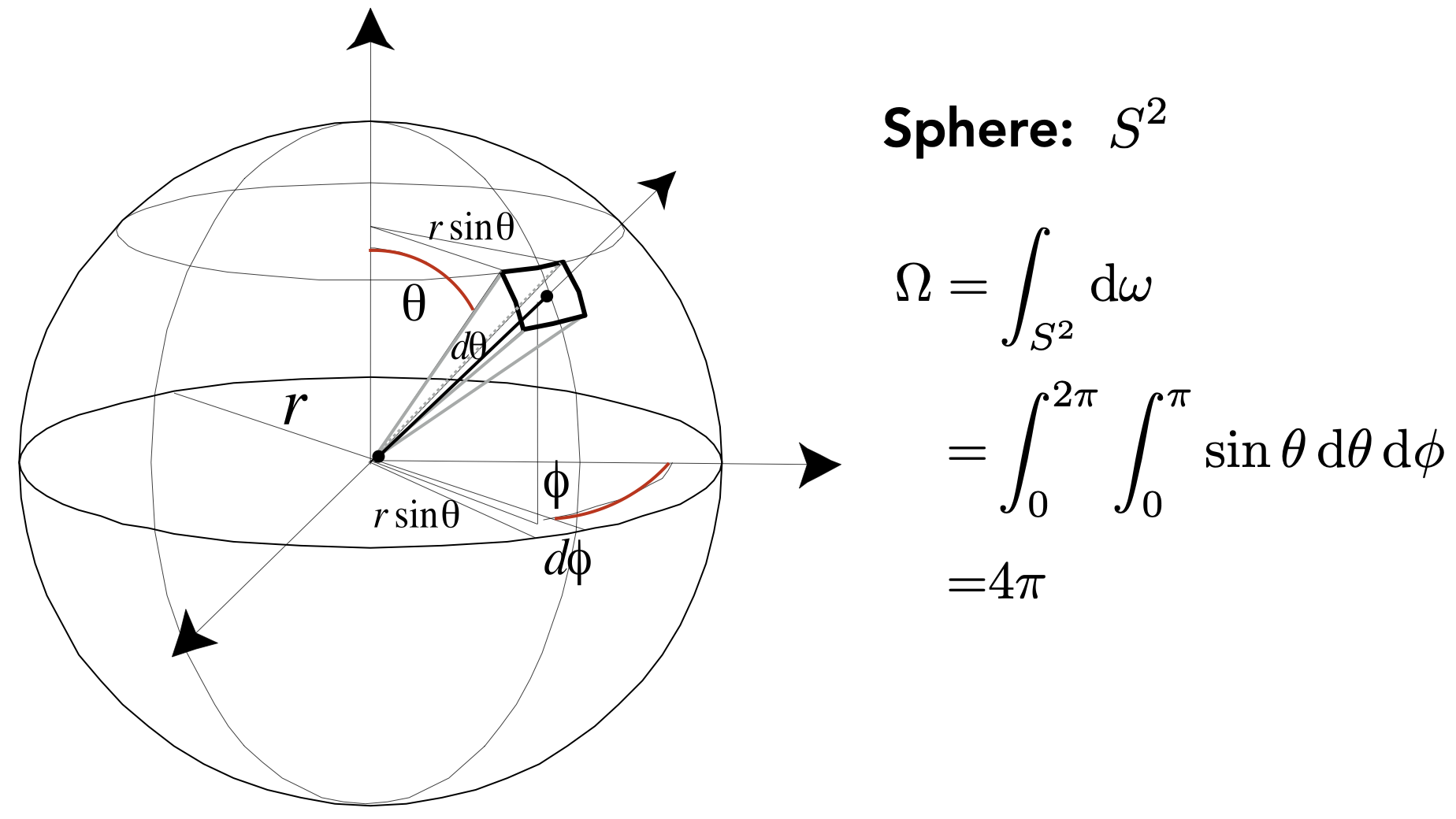
Angles and Solid Angles 立体角
- 单位立体角定义:在半径 $r$ 的球面上面积为 $r^2$ 的面元对球心的张角为 $1sr$ ,因为球面的面积是 $4 \pi r^2$ ,所以整个球面的立体角为 $4\pi sr$
- 立体角
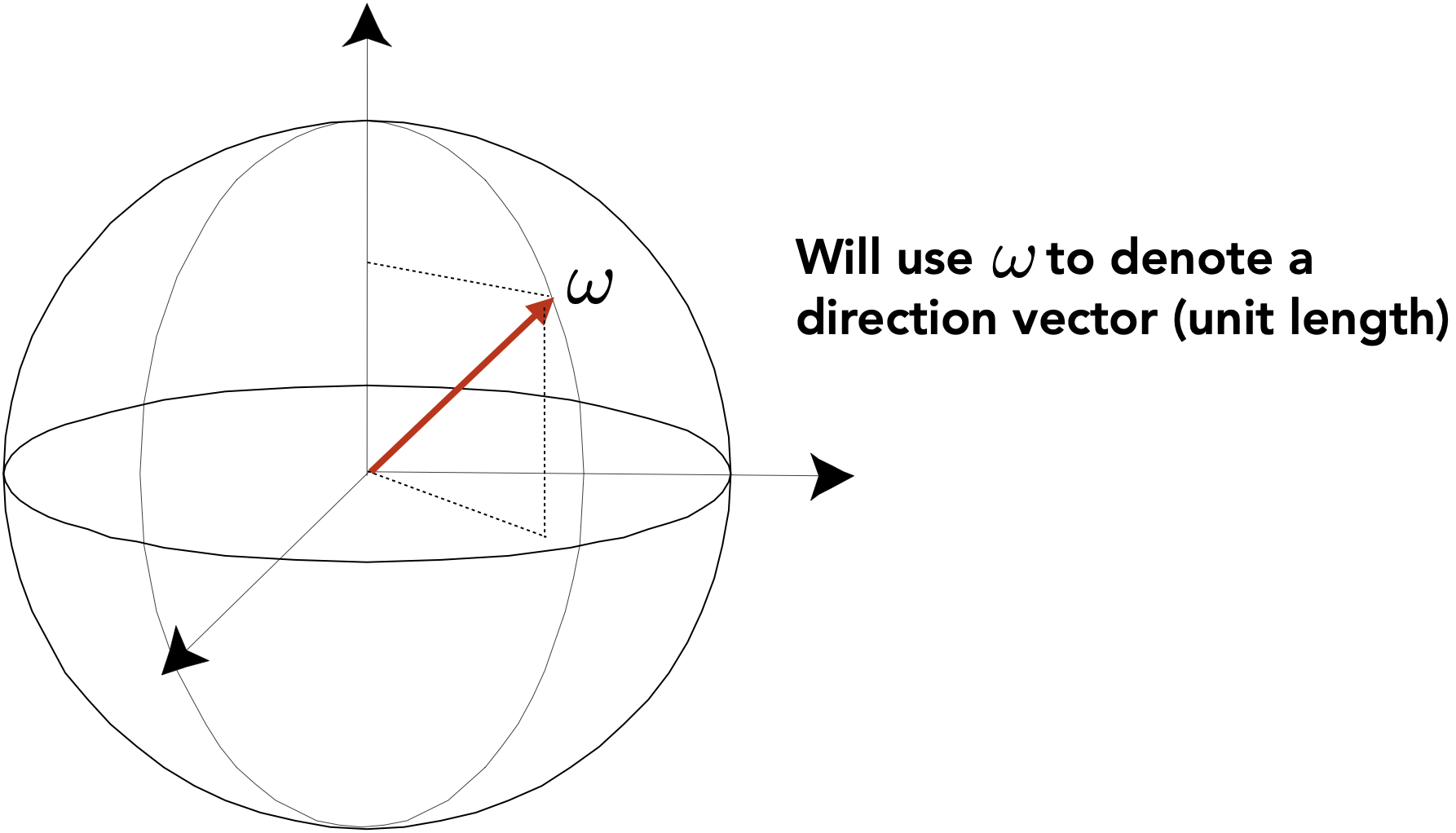
- 辐射度量学中, $\omega$ 通常被用来表示三维空间中方向,由 $\theta$ 和 $\phi$ 来表示具体方向,并可进一步计算出单位立体角
- 若空间中点光源,向四周均匀辐射能量,则辐射强度 $I$ 计算如下
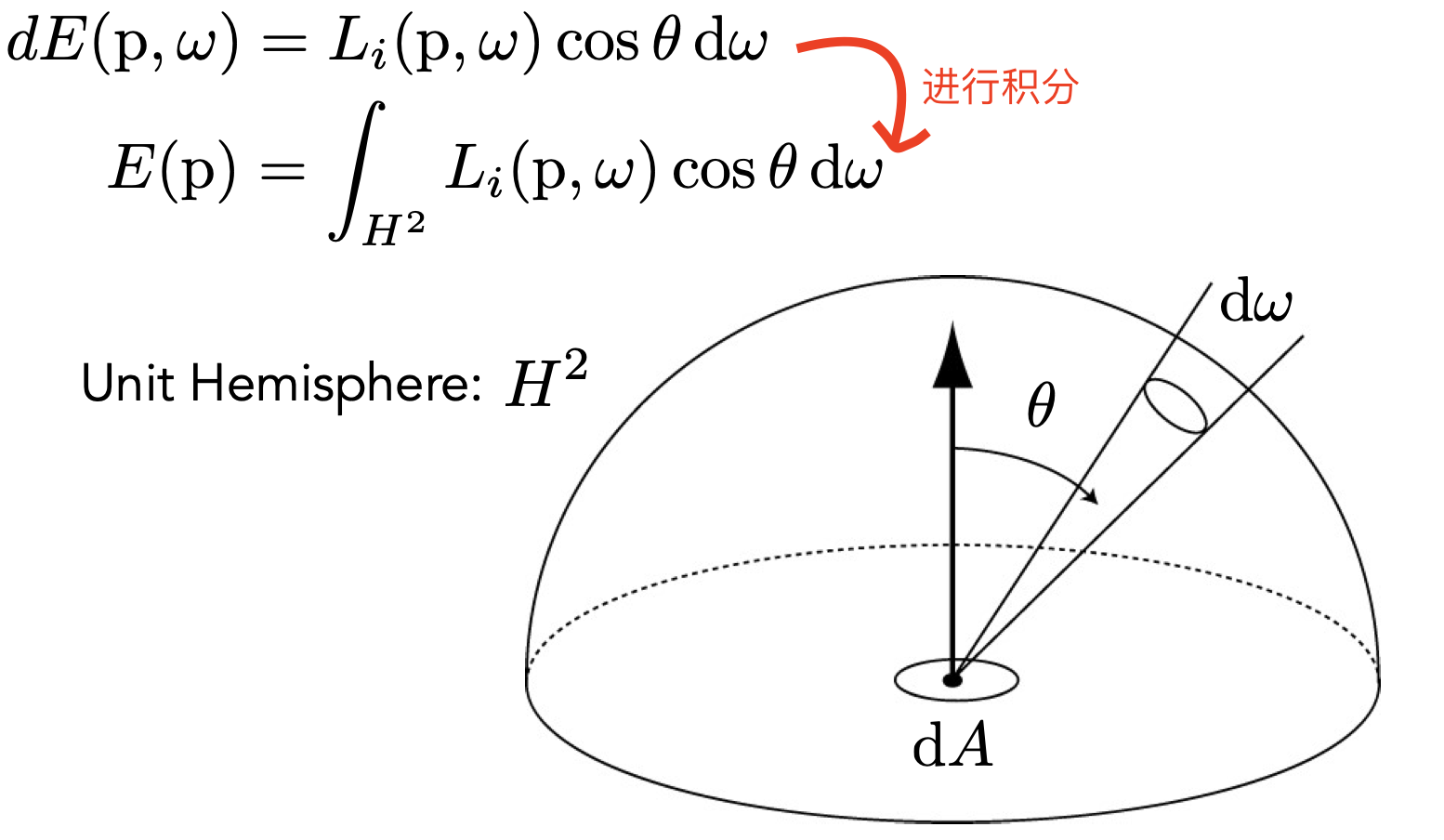
Irradiance $E$
- Irradiance:辐照度,power per unit area incident on a surface point,单位面积上的功率
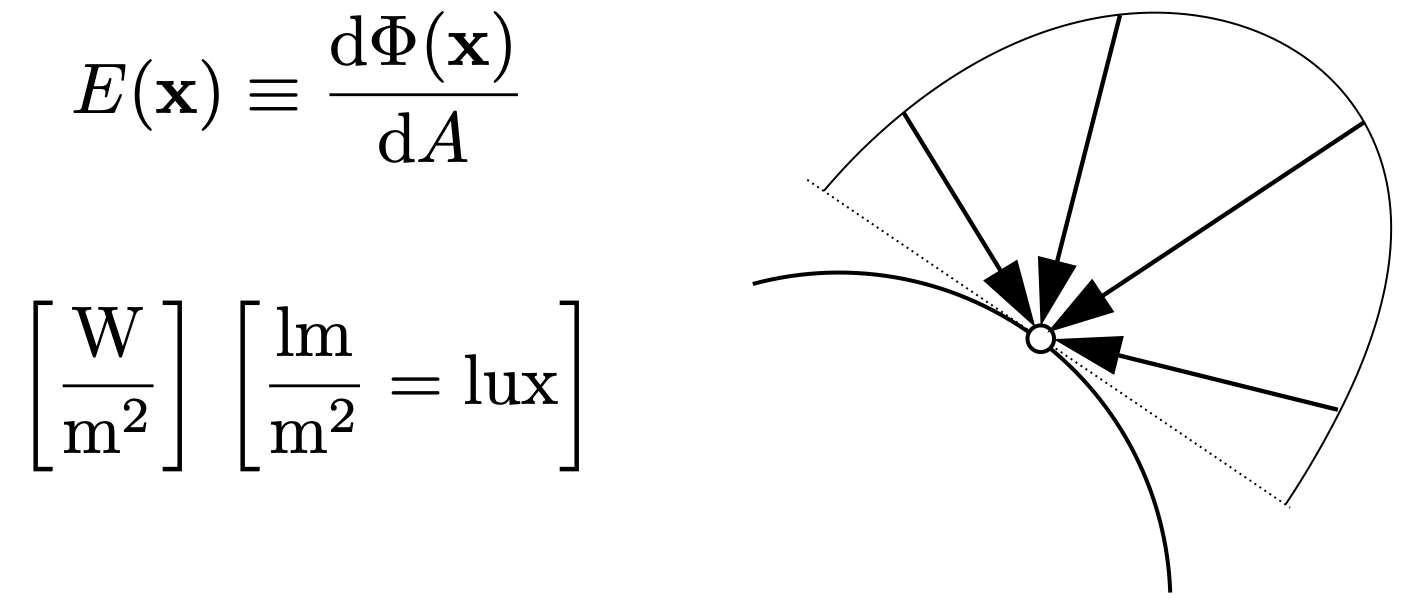
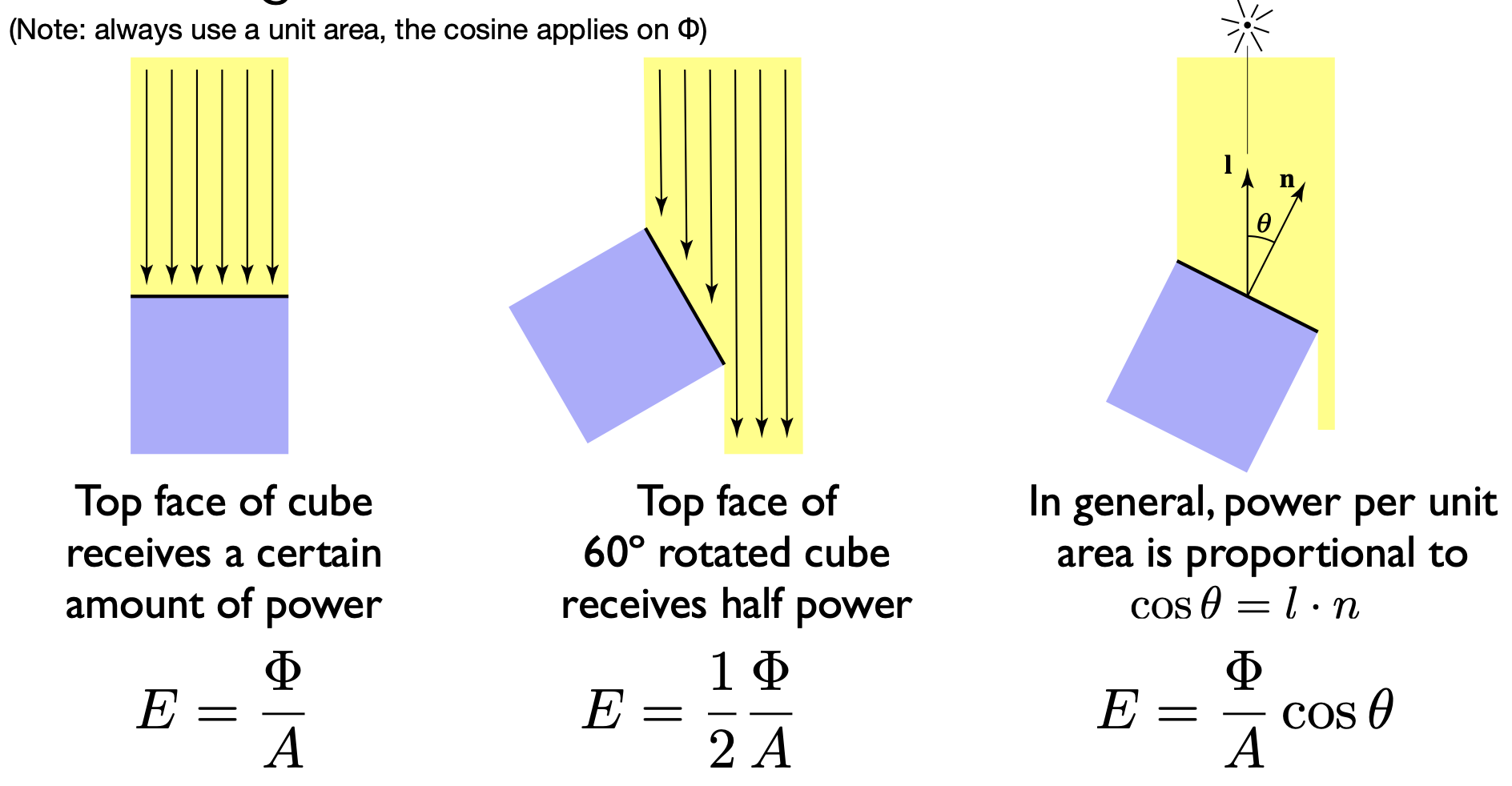
- 入射光需垂直于面,否则需进行投影
重新理解 Lambert’s Cosine Law
- 表面处的辐照度,与光方向和表面法线之间的夹角的余弦值成正比
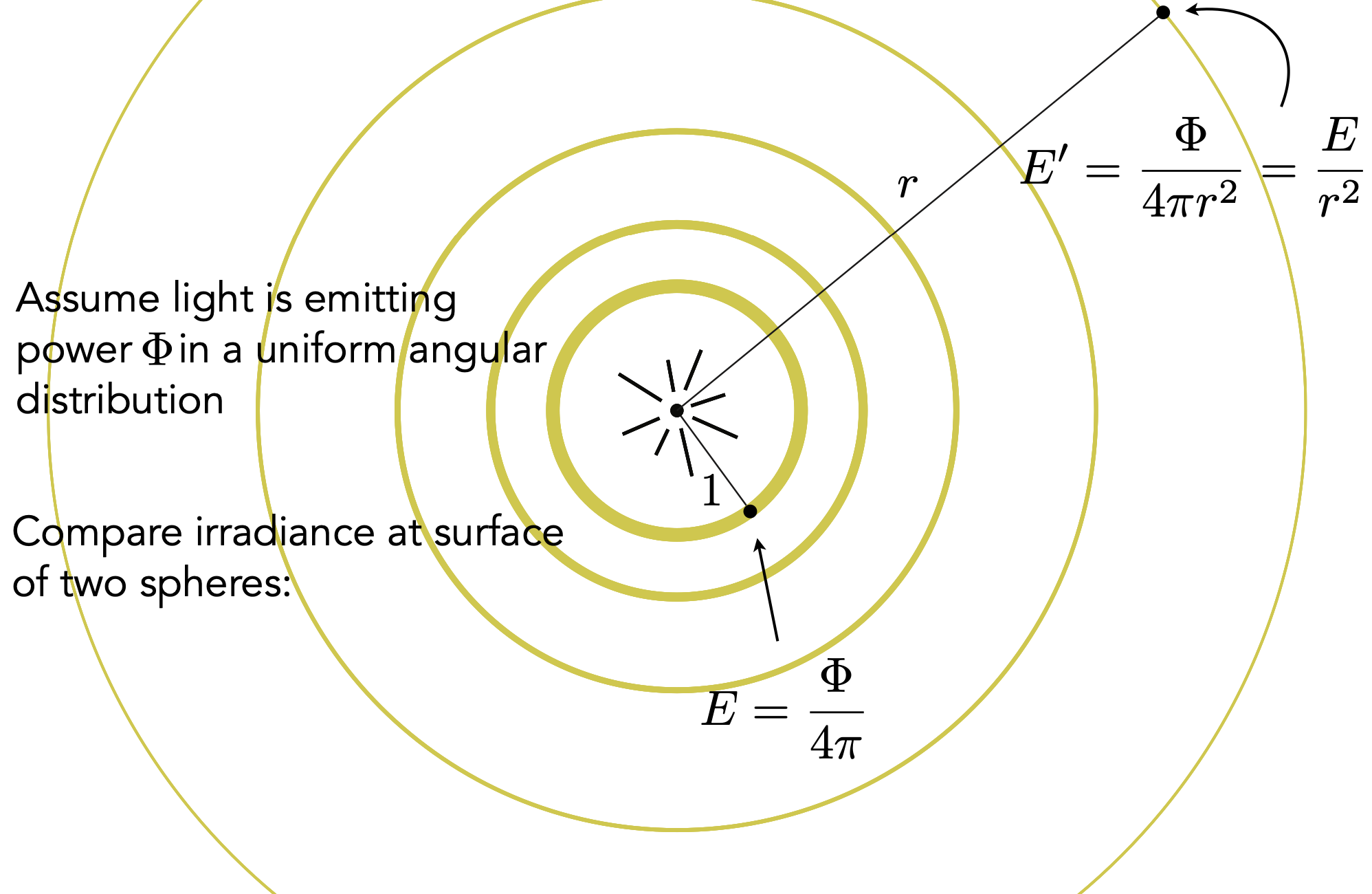
重新理解 Irradiance Falloff
- 在Blin-Phong模型中用到的光线强度随 r2 的衰减的正确理解:光线在传播过程中,irradiance衰减(面积增加),intensity不变(立体角没变)
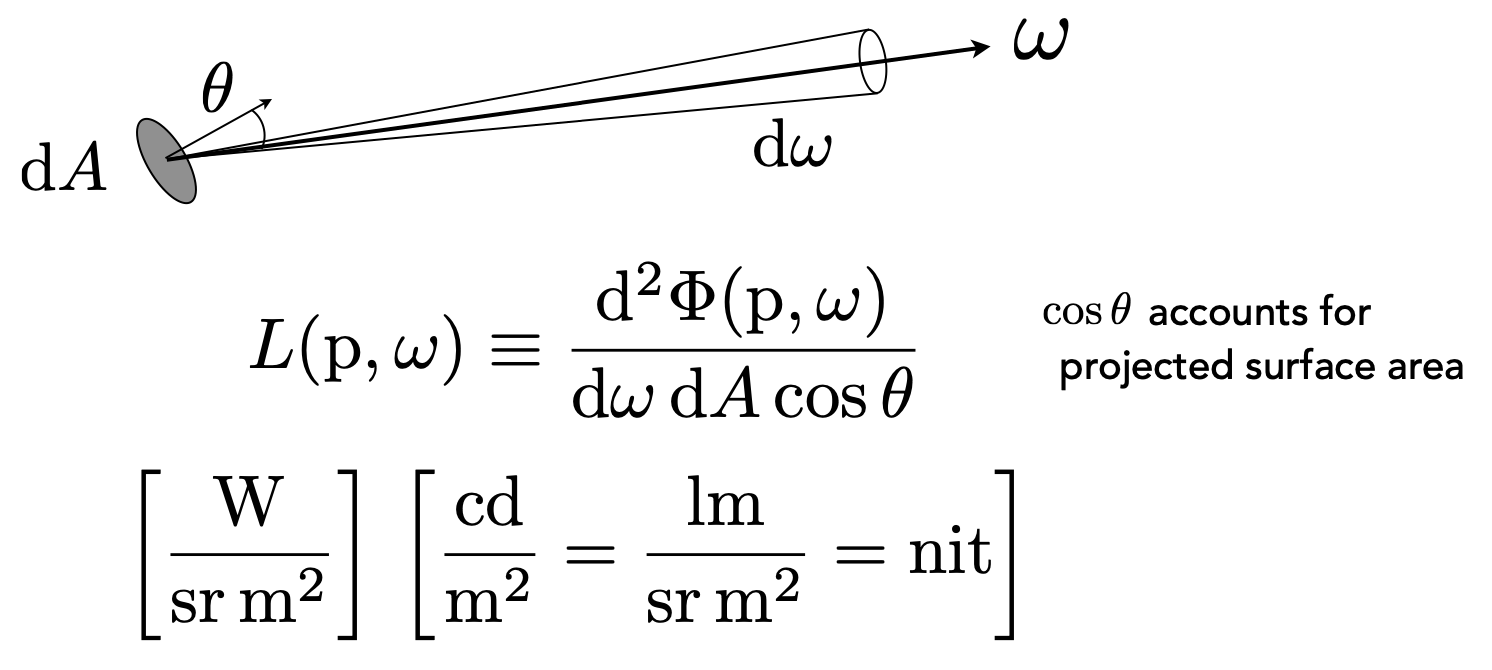
Radiance $L$
- 为了描述光线在传播过程中能量的度量
- Radiance:power,在单位角per unit solid angle,单位投影面积上per projected unit area,上发射、反射、投射、接受的量
对比Irradiance、Intensity、Radiance
- Incident Radiance 入射
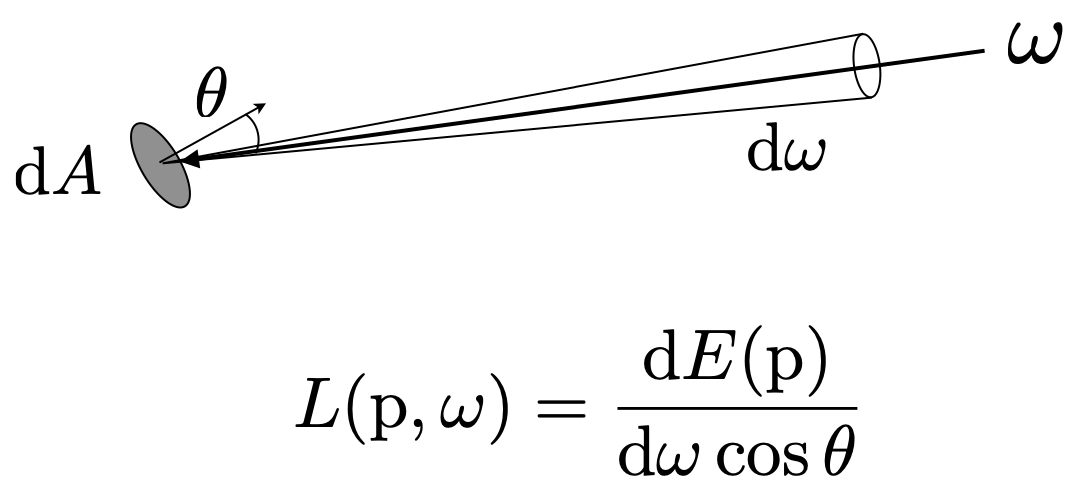
- Incident radiance is the irradiance per unit solid angle arriving at the surface
- 是沿着给定光线(表面点和入射方向)到达表面的光
- Exiting Radiance
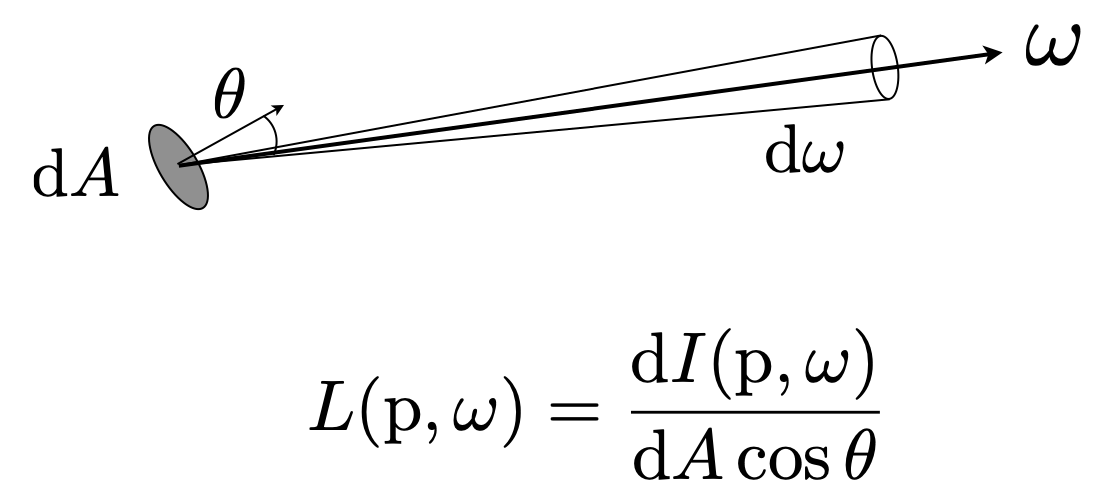
- Exiting surface radiance is the intensity per unit projected area leaving the surface.
- 对于区域光,它是沿给定光线(表面上的点和出口方向)发射的光
- Irradiance vs. Radiance
- Irradiance $E$ :$dA$ 收到的所能量
- Radiance $L$ :针对Irradiance作出特定方向立体角 $d\omega$ 的限制
BRDF (Bidirectional Reflectance Distribution Function 双向反射分布函数)
定义一个函数描述不同表面的反射特性——从某个方向入射的光线,反射到另一个特定方向上的能量是多少
- Reflection at a Point
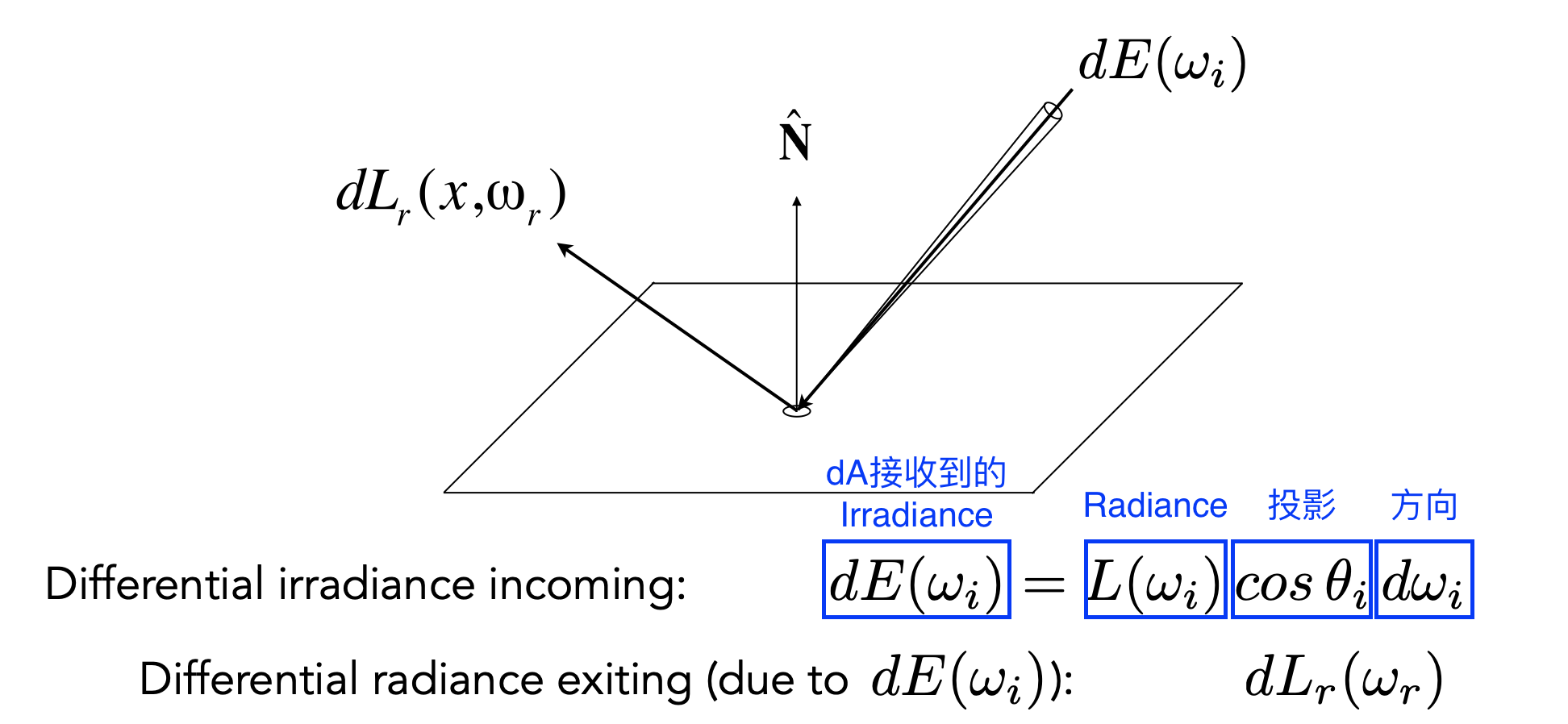
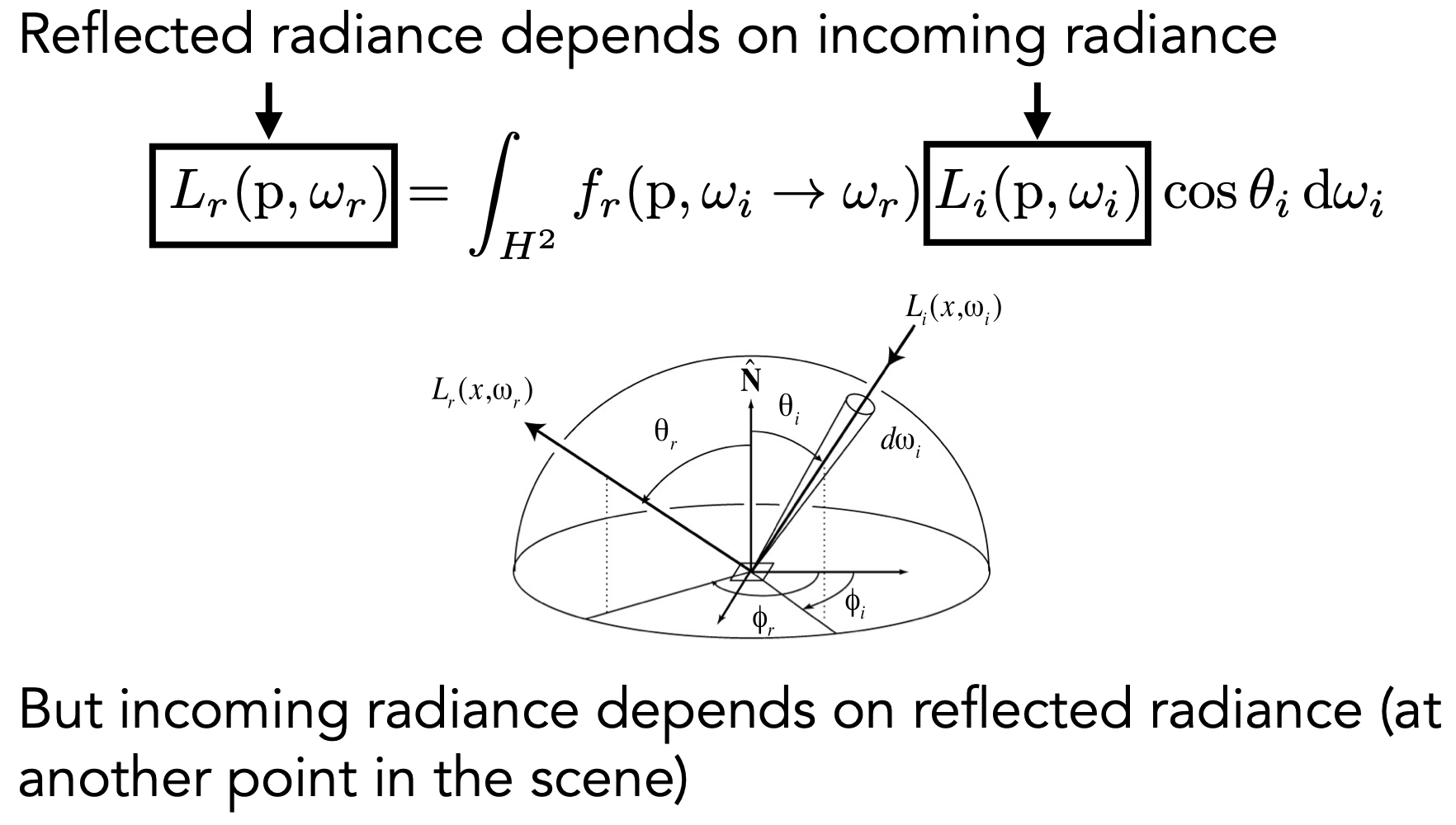
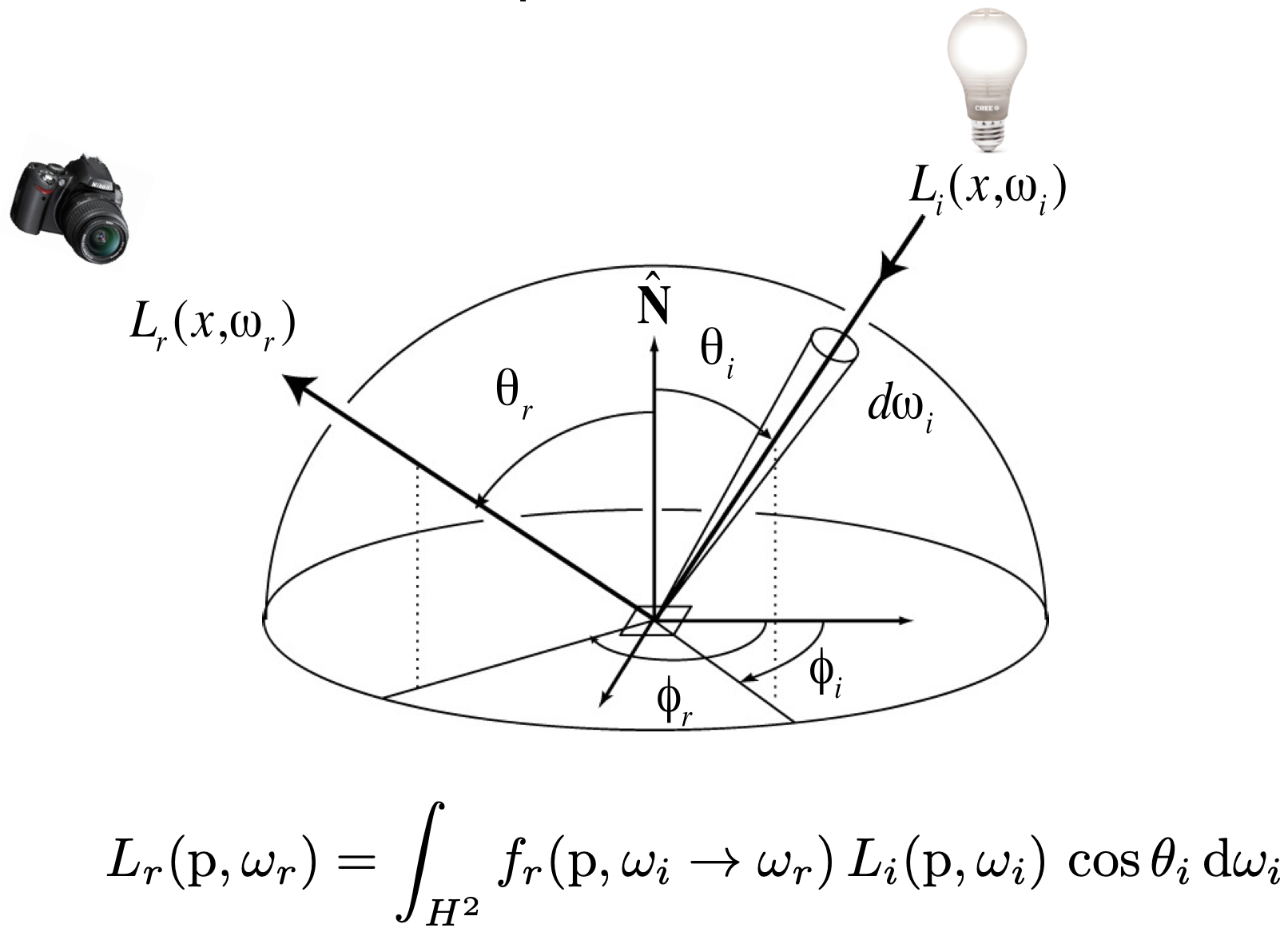
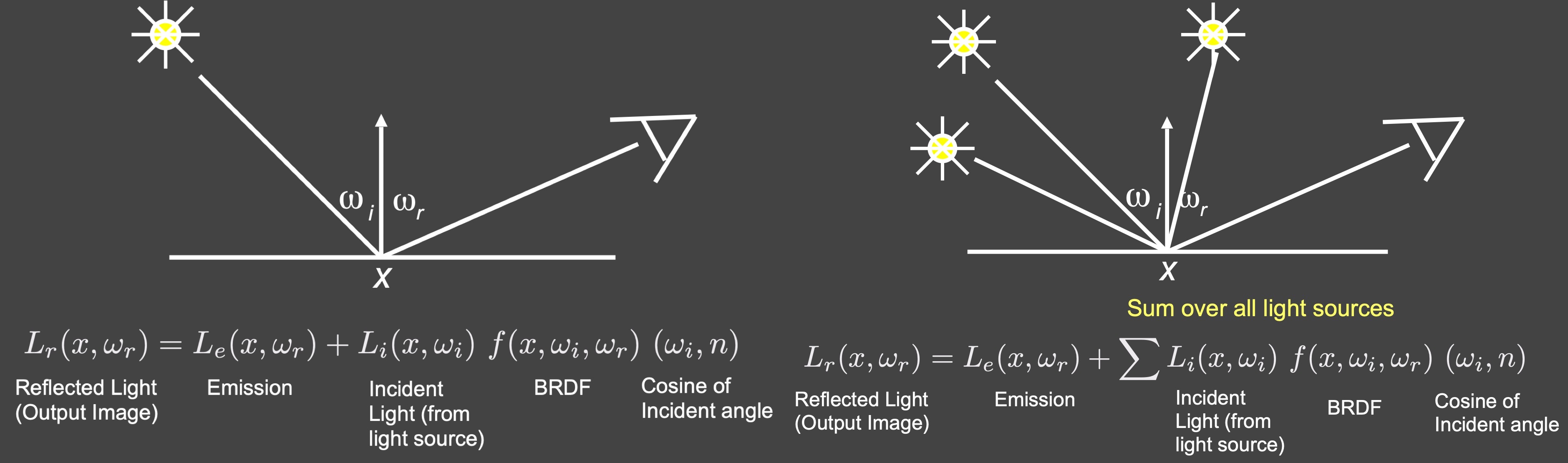
Reflection Equation 反射方程
- 考虑任何一个方向的入射光,对观察点反射光的贡献,叠加所有方向光的贡献,得到该点最终渲染效果
- 对每个方向的入射irradiance $dE(\omega _i)$ (也就是 $L_i(p,\omega_i)cos\theta_i d\omega_i$ )都乘BRDF,而后对方向积分,得到出射Radiance $L_r(p,\omega_r)$ ,进而得出最终的观察结果
- Challenge: Recursive Equation 递归方程
- 入射的Irradiance不只来自光源,也来自其他物体的反射(递归)
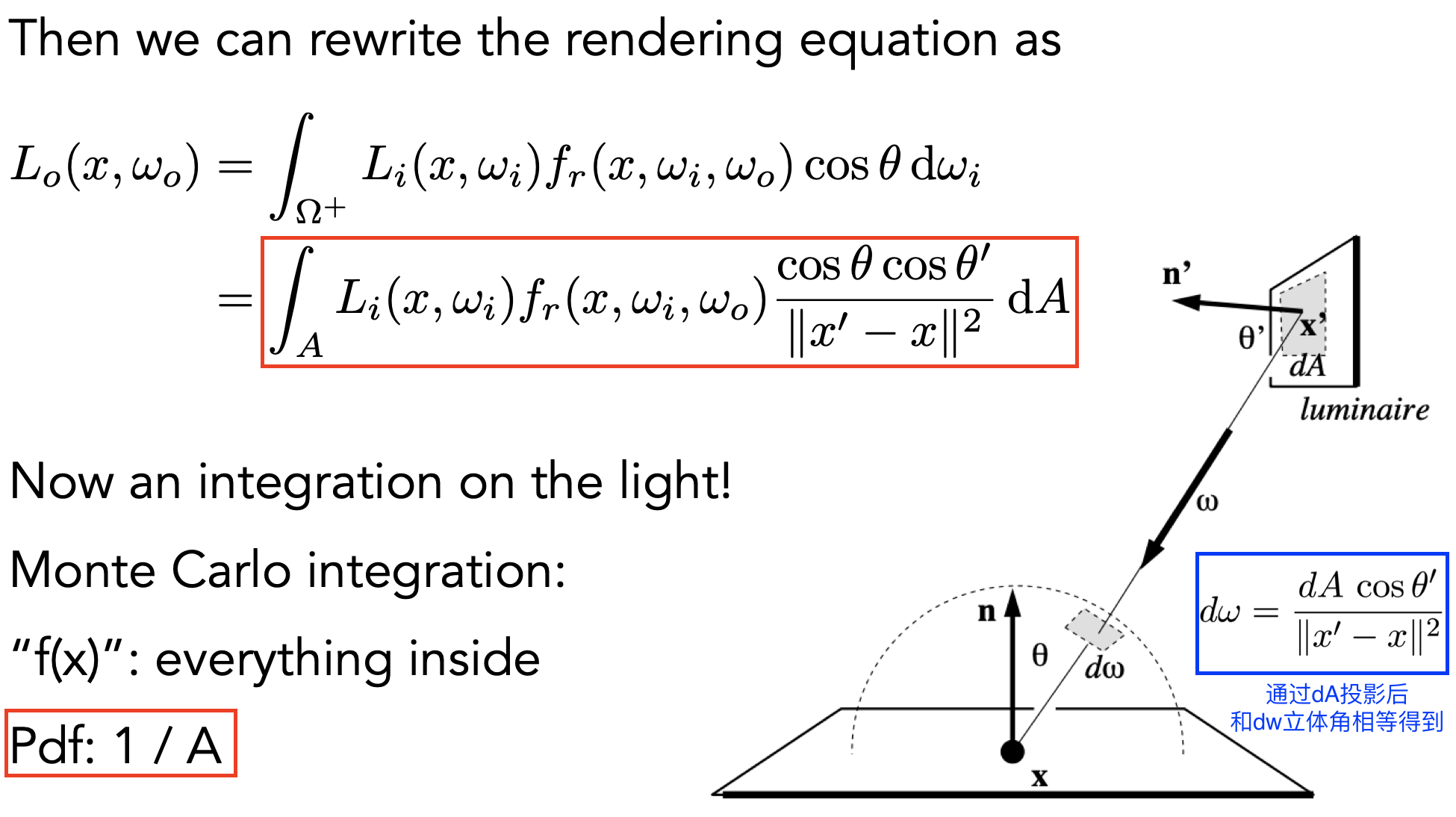
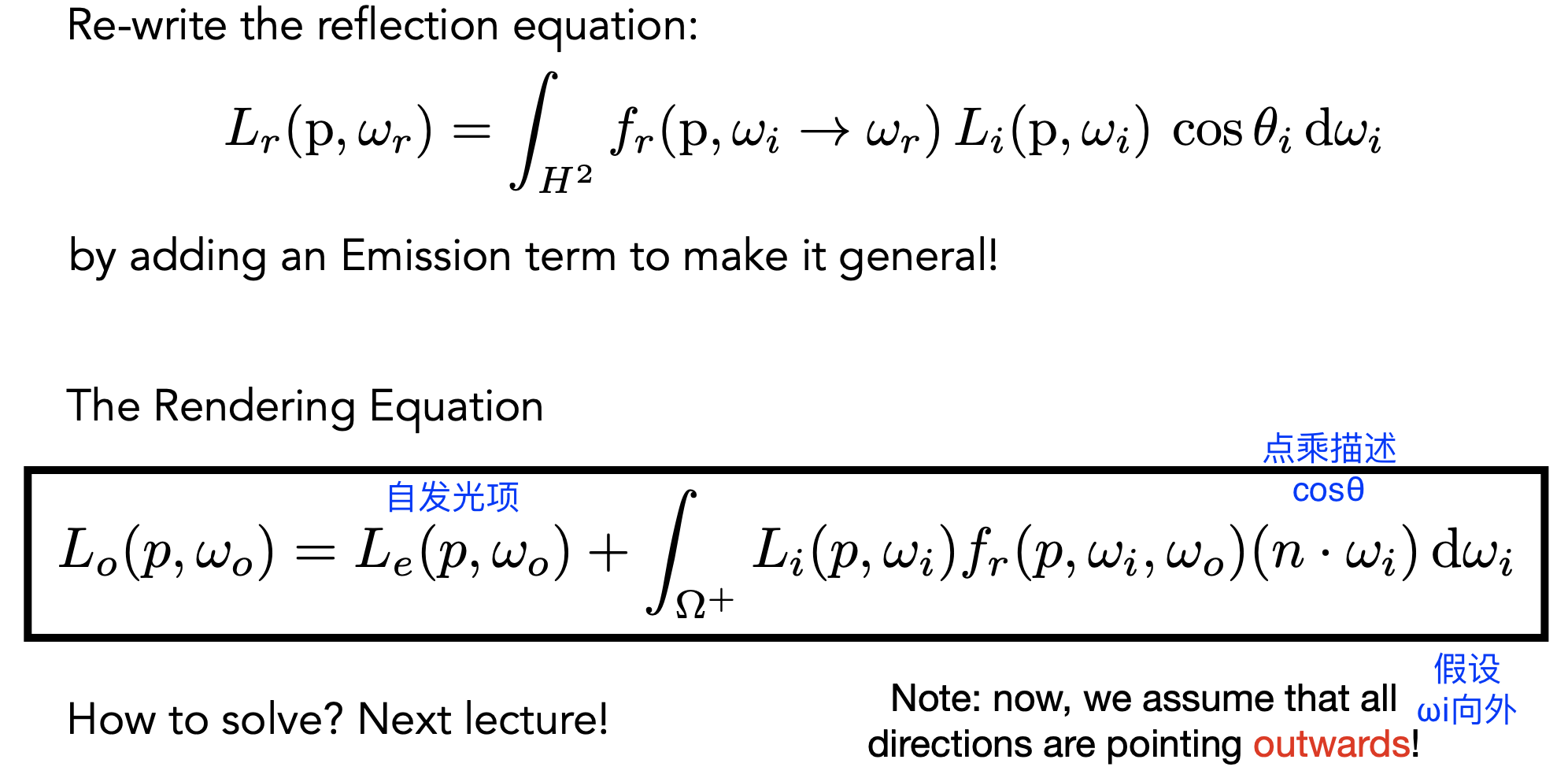
Rendering Equation 渲染方程
Intro
- 上述Reflection Equation忽略了自发光,Rendering Equation添加了自发光项,可用于所有类型的光线传播
理解渲染方程
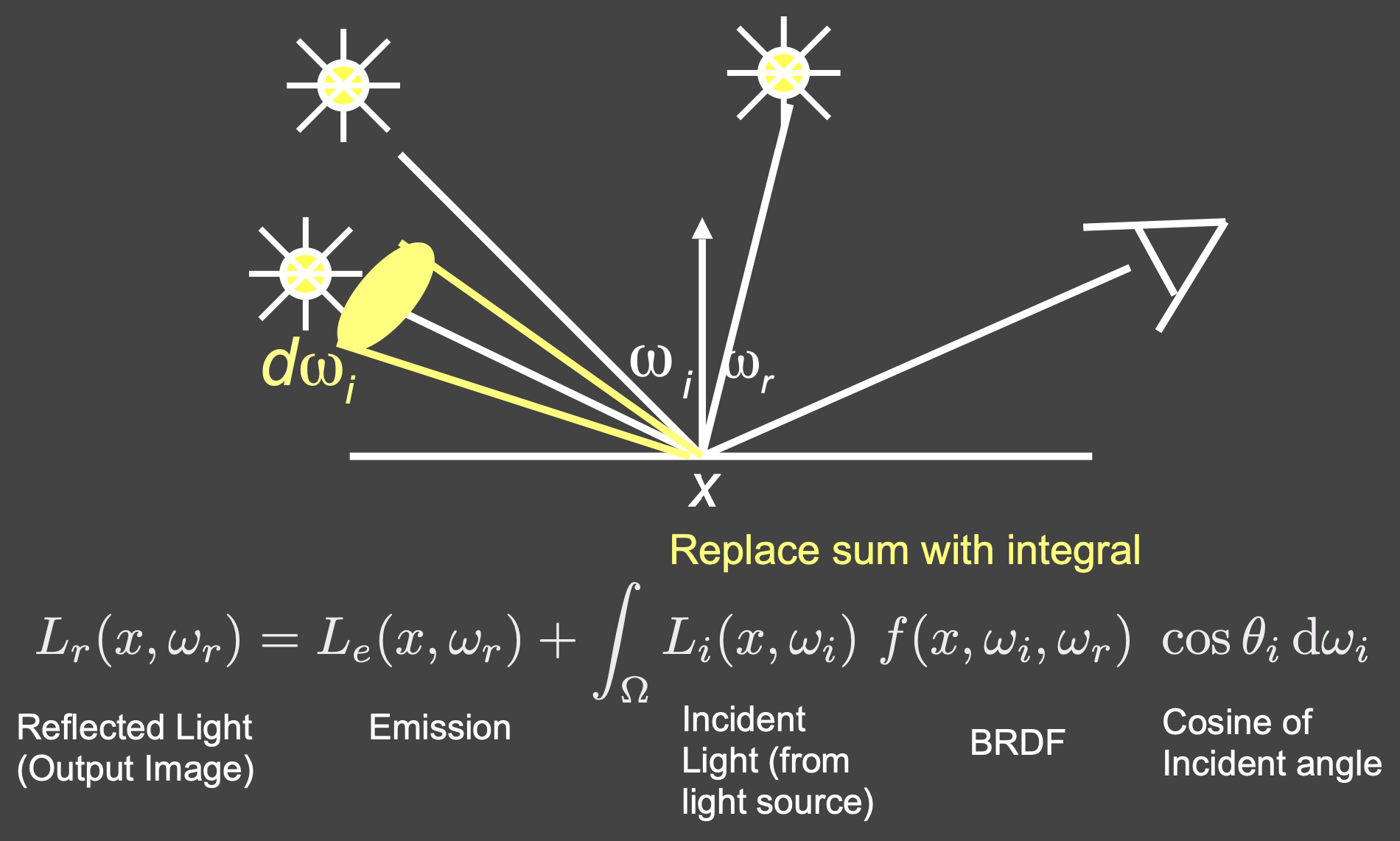
一个方向的光$\rightarrow$多个方向的光:累加
引入面光源:积分面光源所占的立体角
渲染方程的递归简化求解
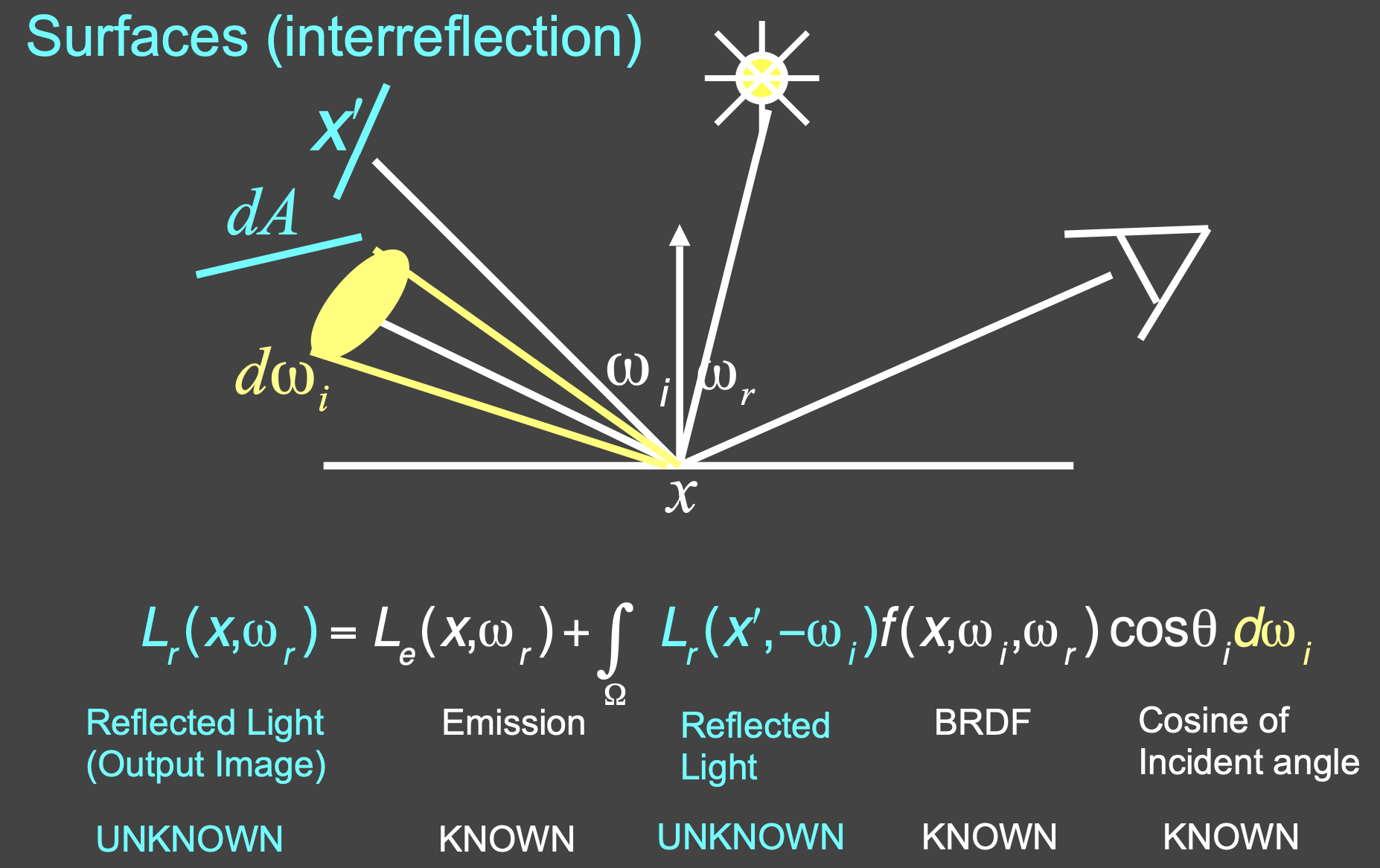
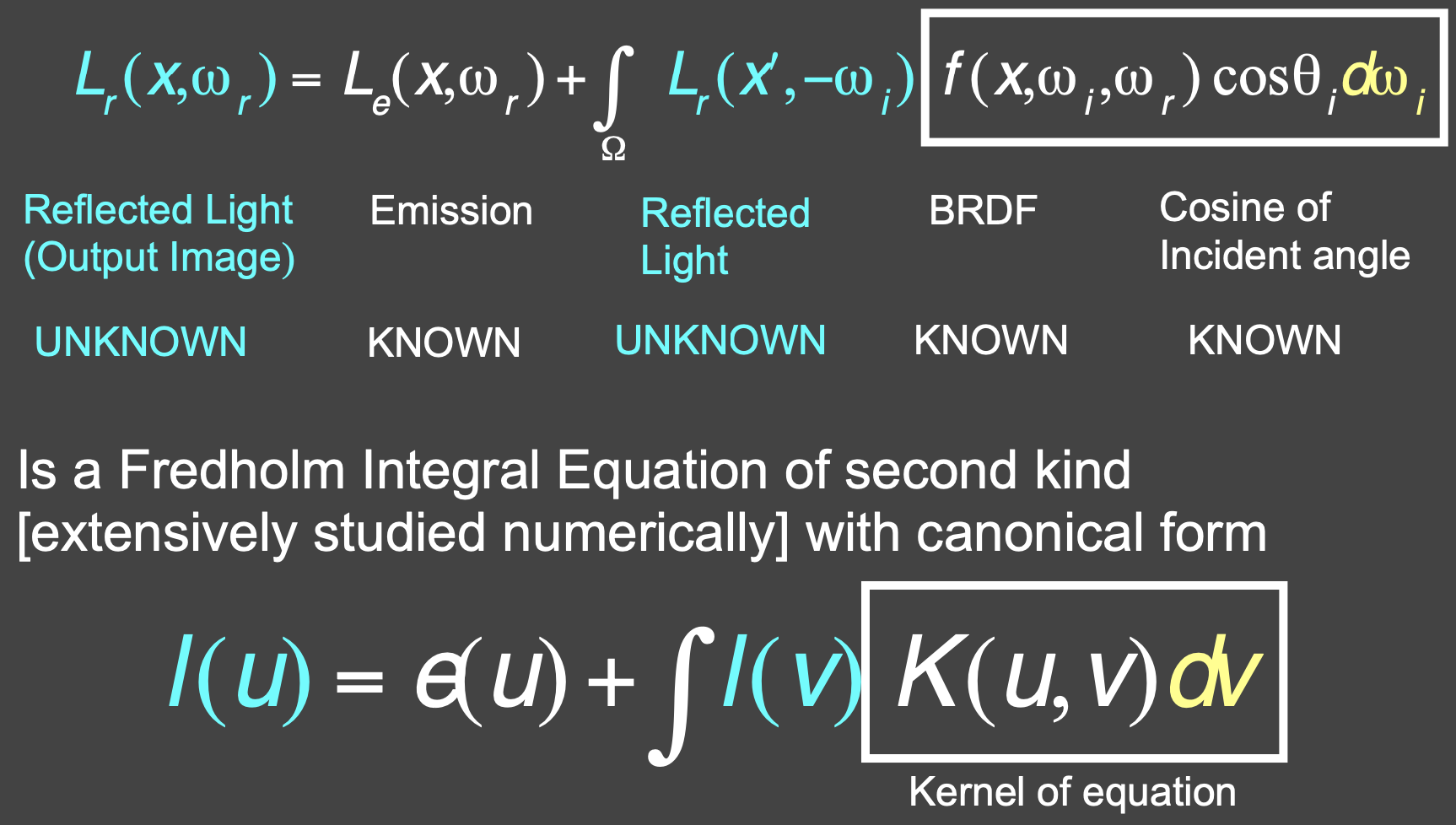
- 未知量:入射&出射Radiance
- 渲染方程的简化
- 用 $l$ 表示不同位置辐射的Radiance,$u \& v$ 表示不同位置,简化为线性积分
- 线性积分进一步简化
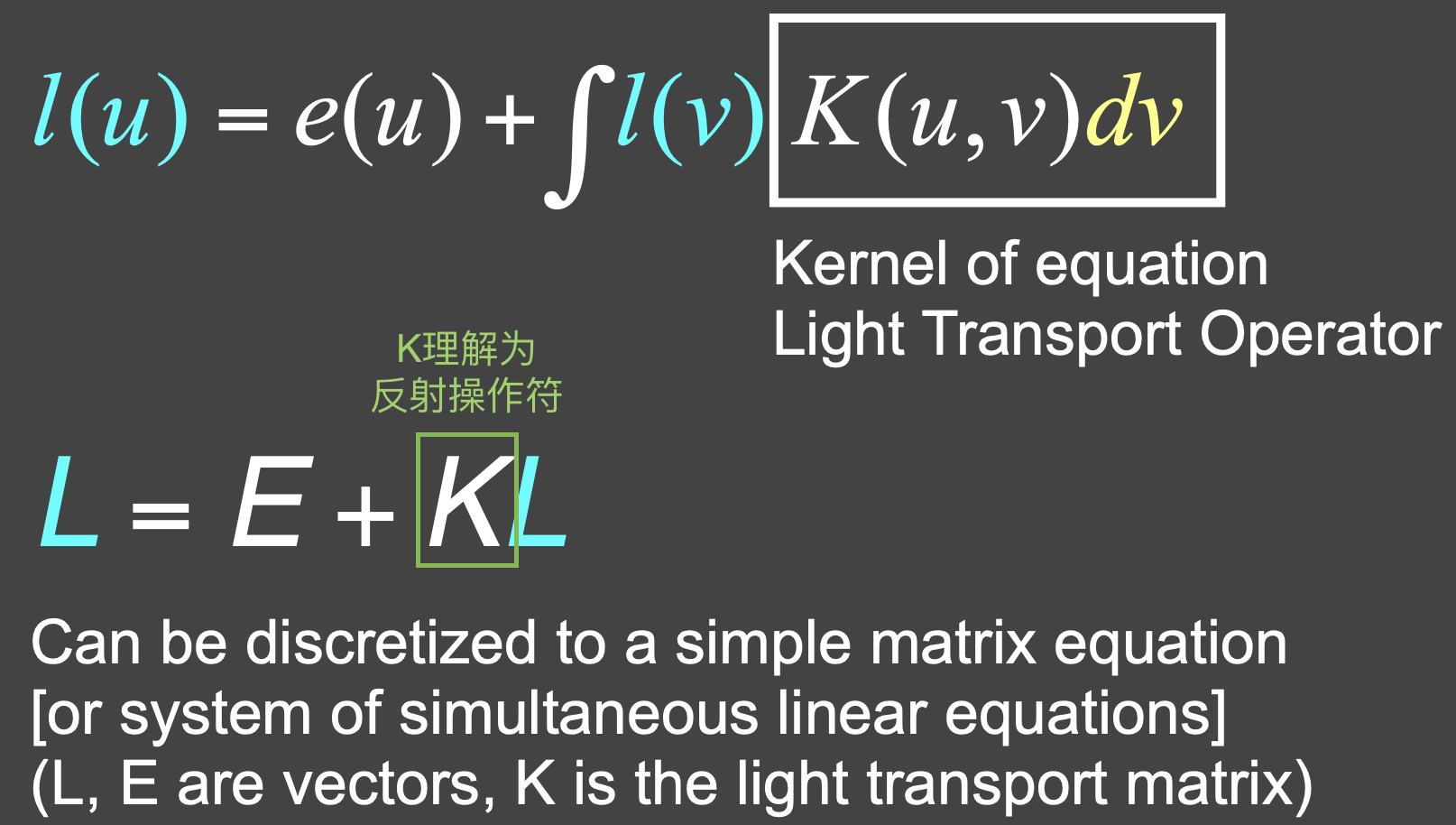
- 简化为了求解渲染方程,即求解 $L$
- $K$ 为反射算子,是矩阵形式
- 用 $l$ 表示不同位置辐射的Radiance,$u \& v$ 表示不同位置,简化为线性积分
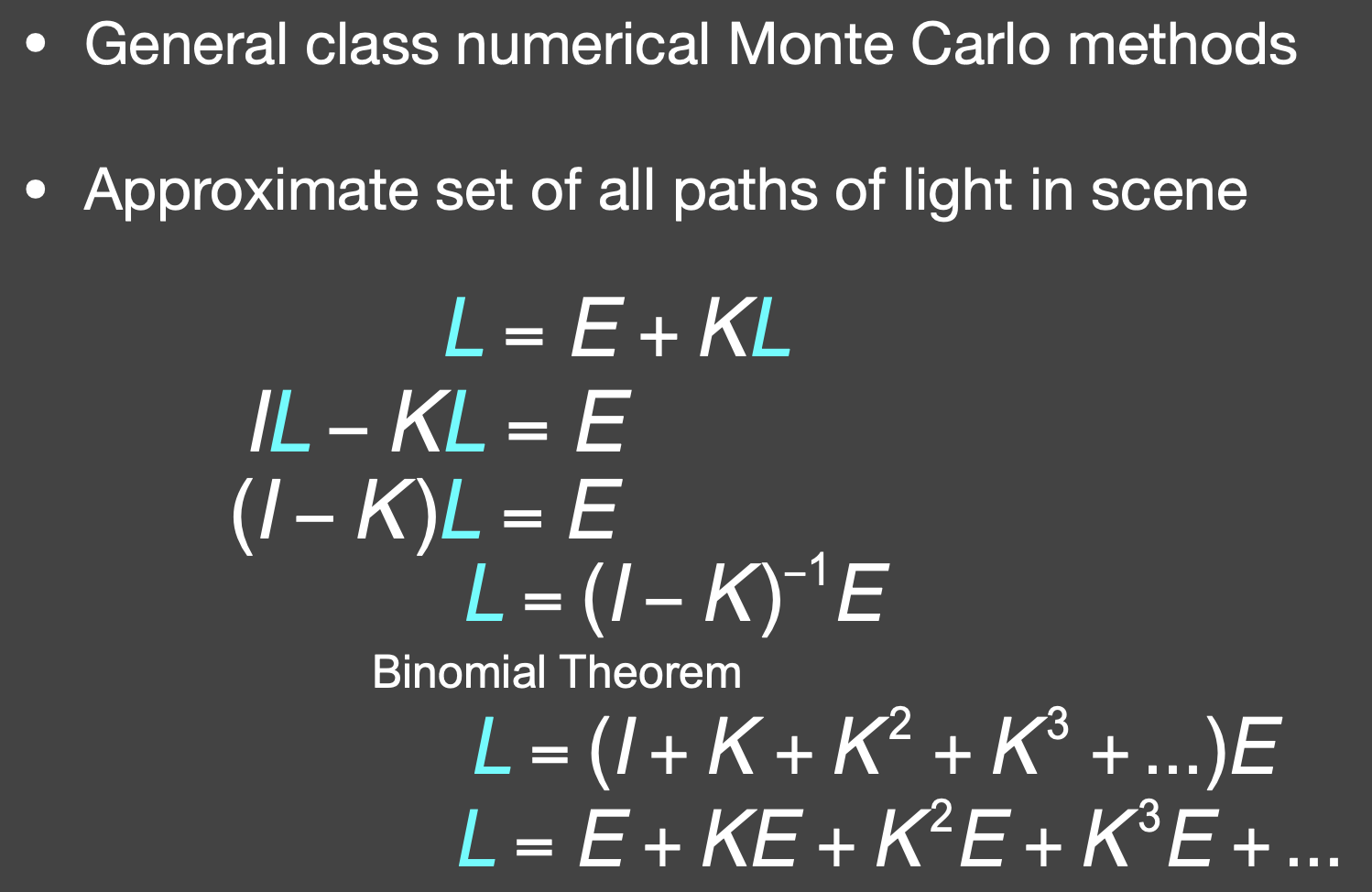
求解渲染方程
- 其中 $I$ 为identity单位矩阵
- 通过一些类似泰勒展开的操作进行近似 $(1+x)^\alpha = 1+\alpha x + \frac{\alpha(\alpha -1)}{2!}x^2+\frac{\alpha(\alpha -1)(\alpha -2)}{3!}x^3+…$ (矩阵居然也可以!??!)
- 得到了!
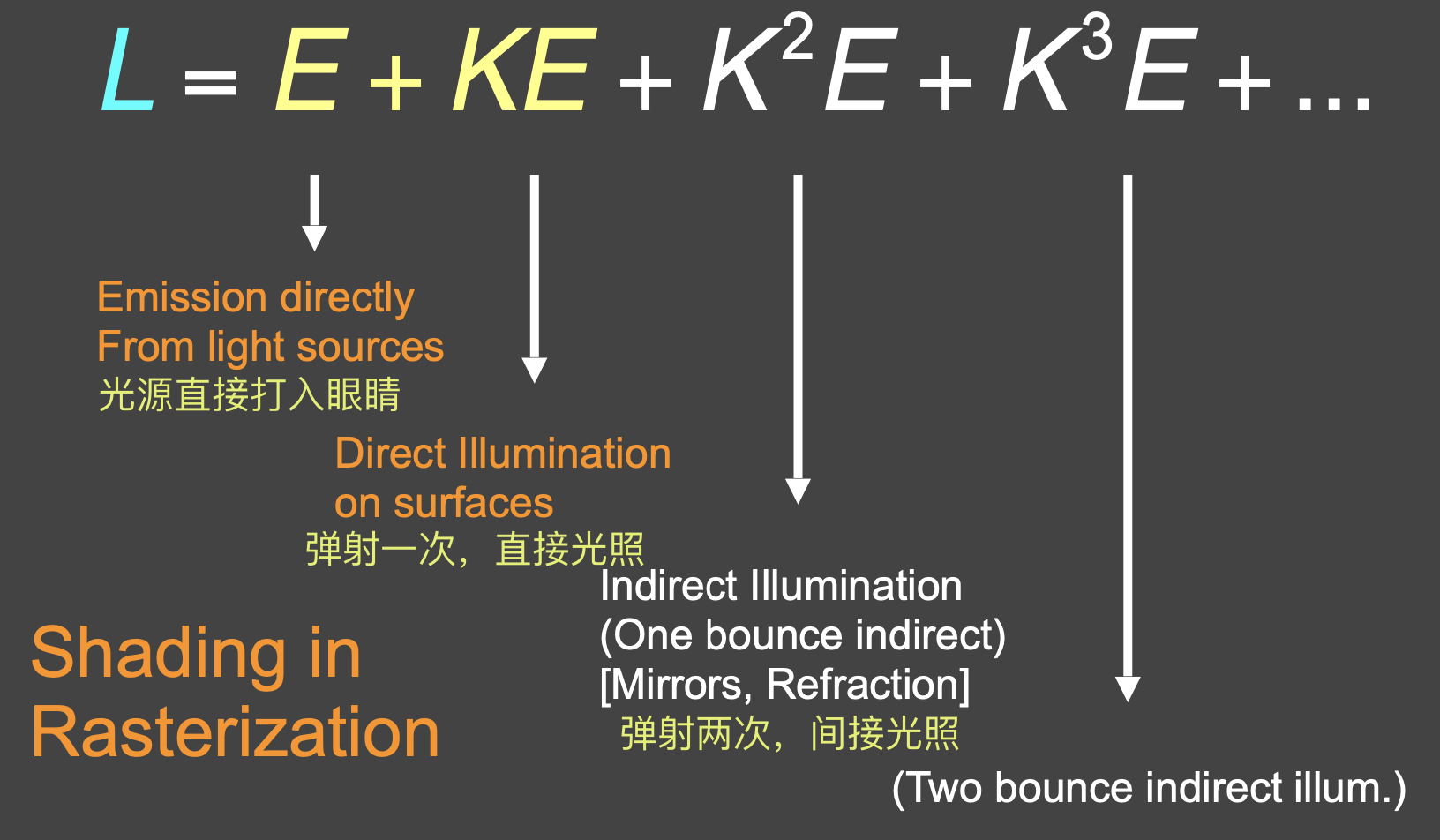
- 所有光线弹射(直接+所有间接)相加,得到全局光照(Global illumination,GI)
- 注:光栅化一般只能做到直接光照;间接光照光追容易做
对比
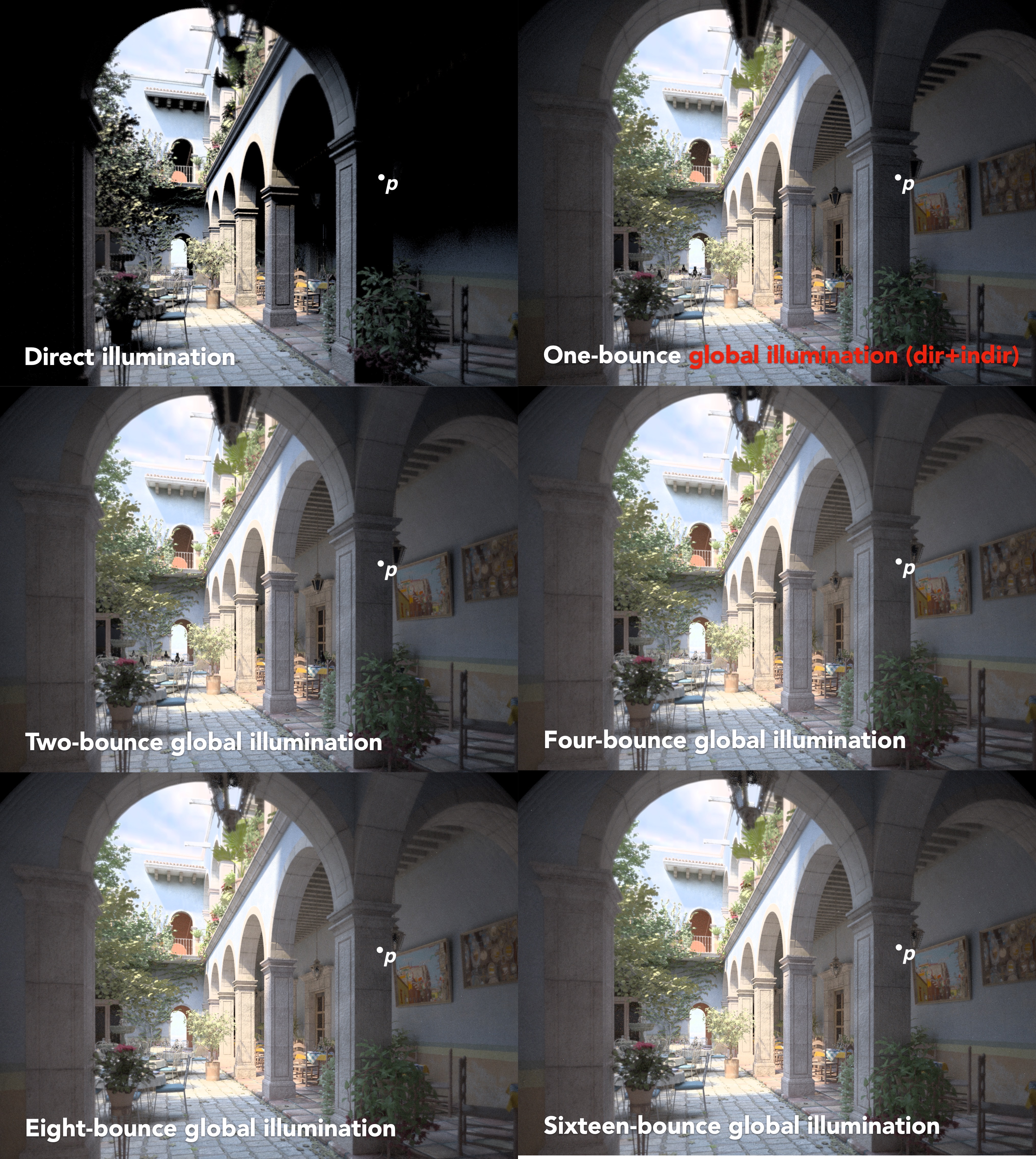
- 关于Two - bounce上方的灯为什么是黑色:从摄影机出发的光线,经过两次弹射还无法从灯中射出(两次弹射进入一个玻璃层,再经过两次弹射方可从另一玻璃层射出)
- 假设可以做无限次光线弹射:亮度收敛到最大值,不会无限增大(泰勒无限展开,无限逼近)
路径追踪是解渲染方程的一种方式
概率论回顾 Probability Review
苍天啊!!!!!!!!
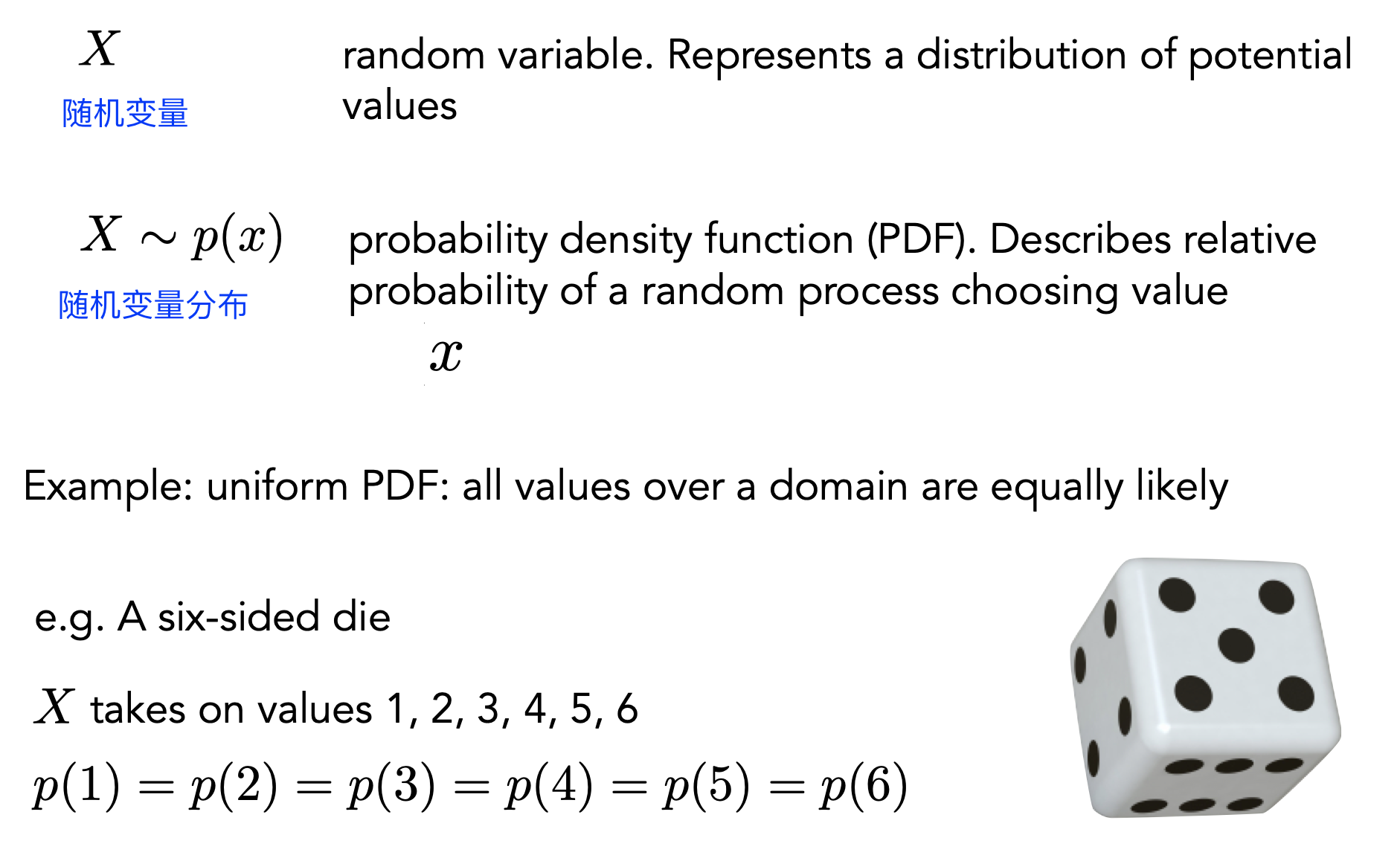
- Random Variables 随机变量
- Probabilities
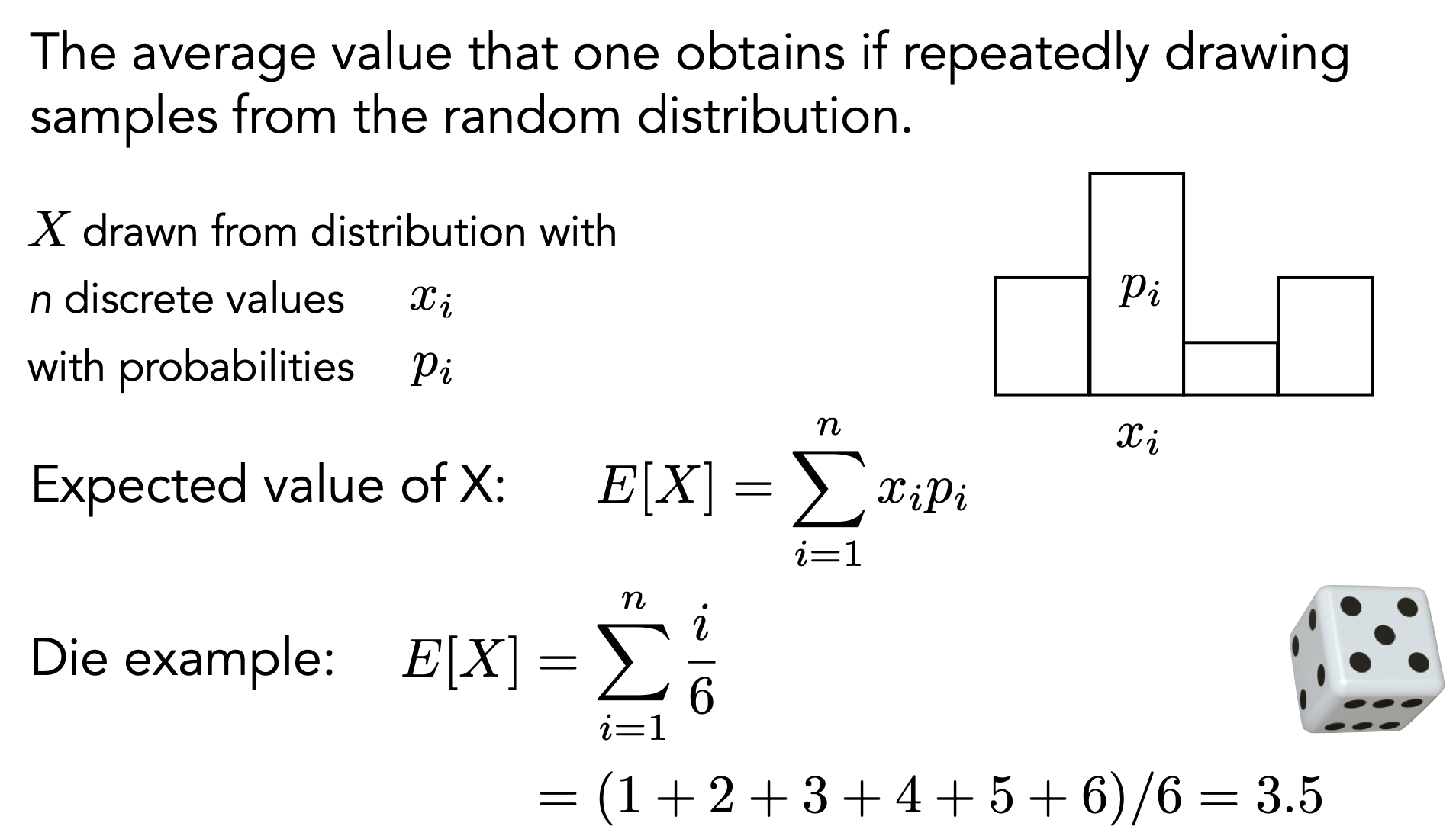
- $n$ 中情况:$x_i$
- with probability:$p_i$
- 满足
- $p_i\geq 0$
- $\sum_{i=1}^n p_i = 1$
- Expected Value of a Random Variable 期望
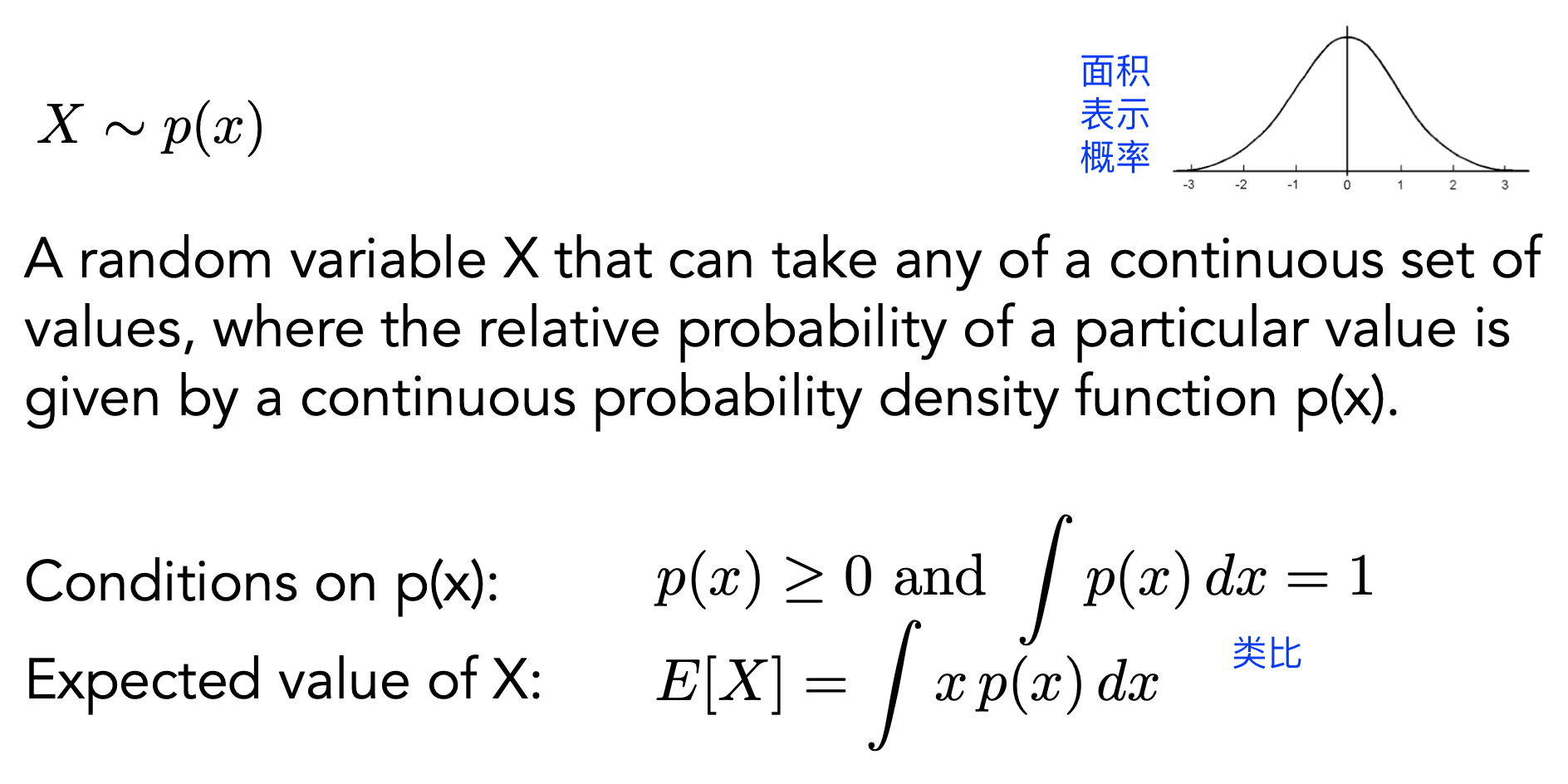
- Continuous Case 连续情况下描述变量和分布
- 概率密度函数 Probability Distribution Function (PDF)
- 概率密度函数 Probability Distribution Function (PDF)
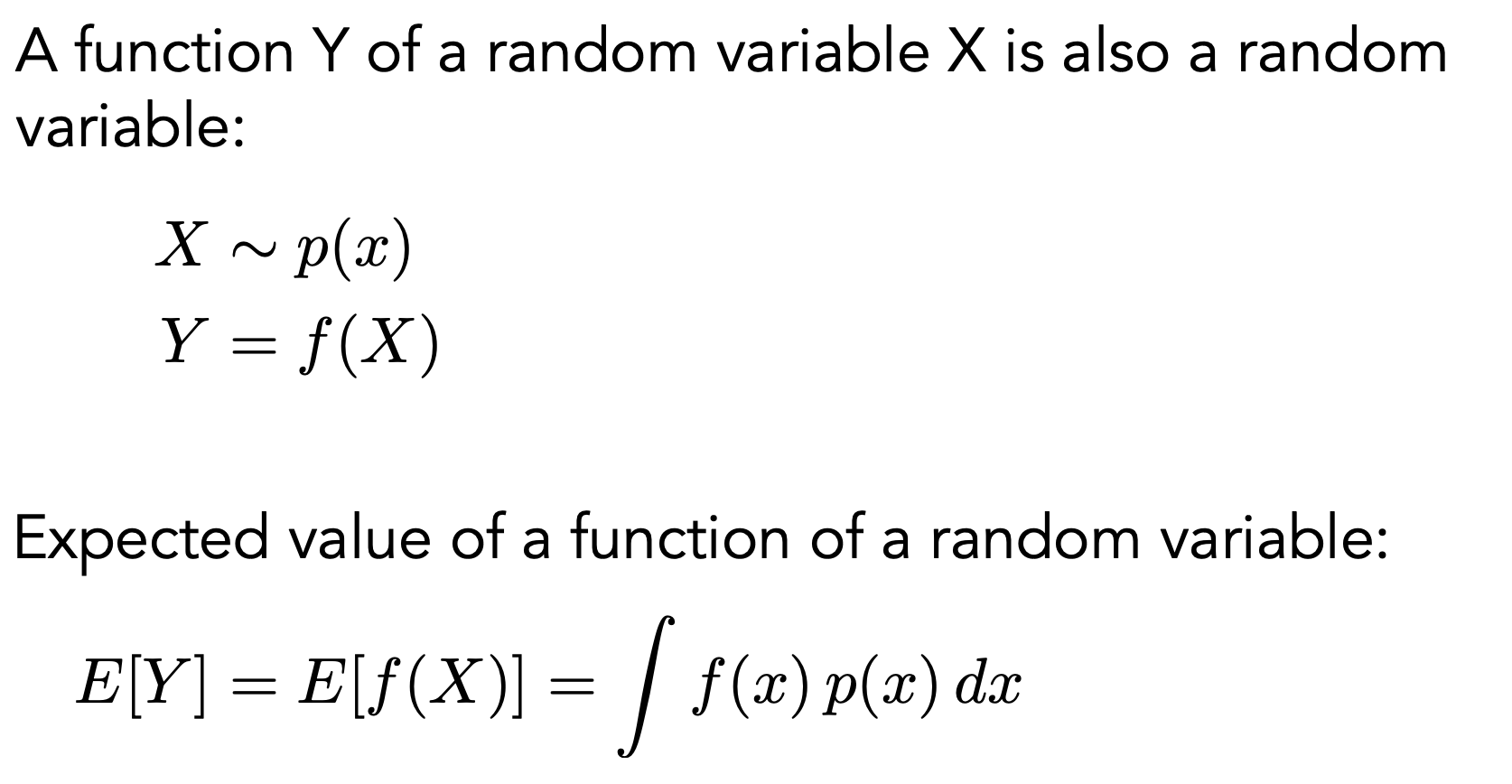
- Function of a Random Variable 随机变量的函数
P16 Ray Tracing4 (Monte Carlo Integration & Path Tracing)
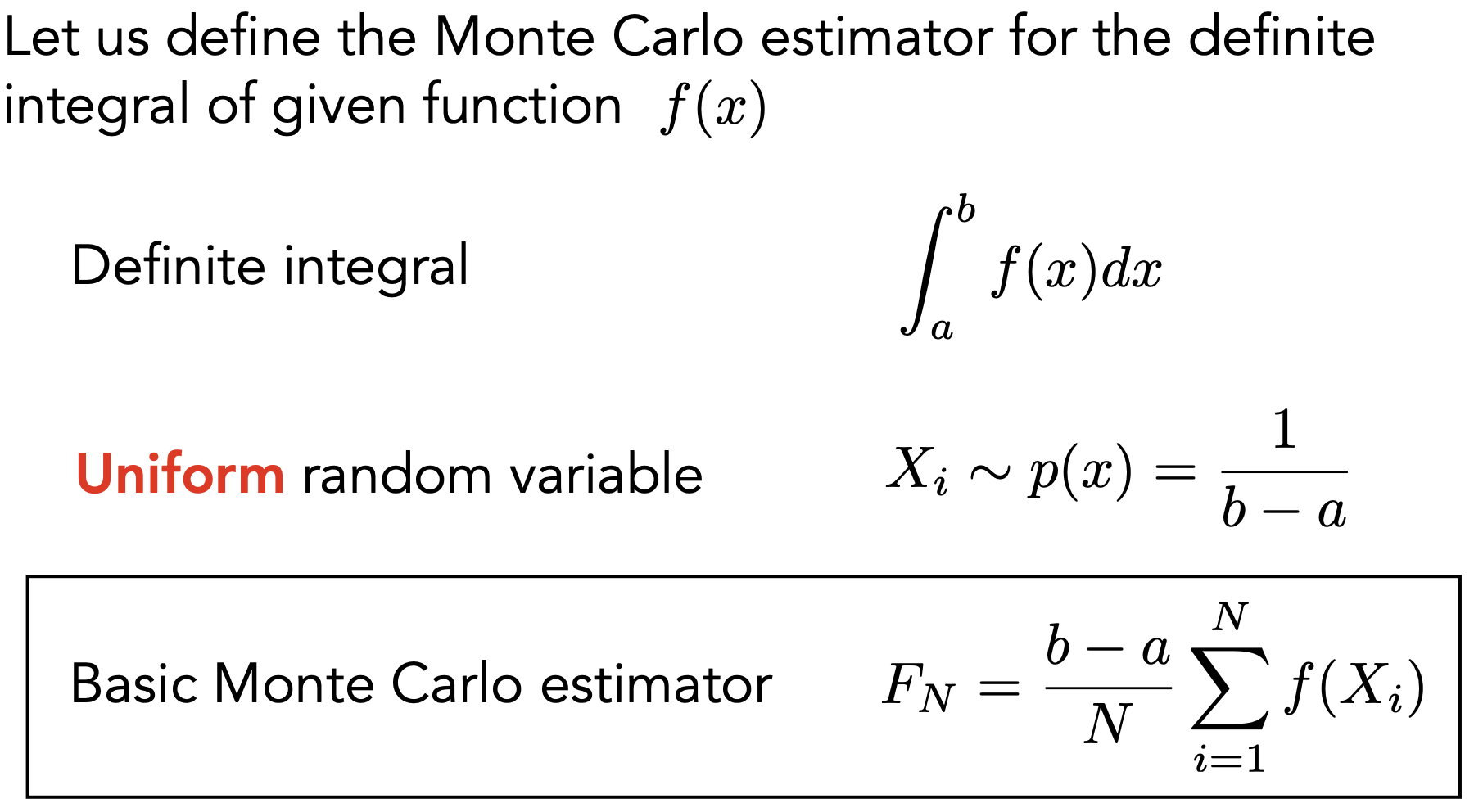
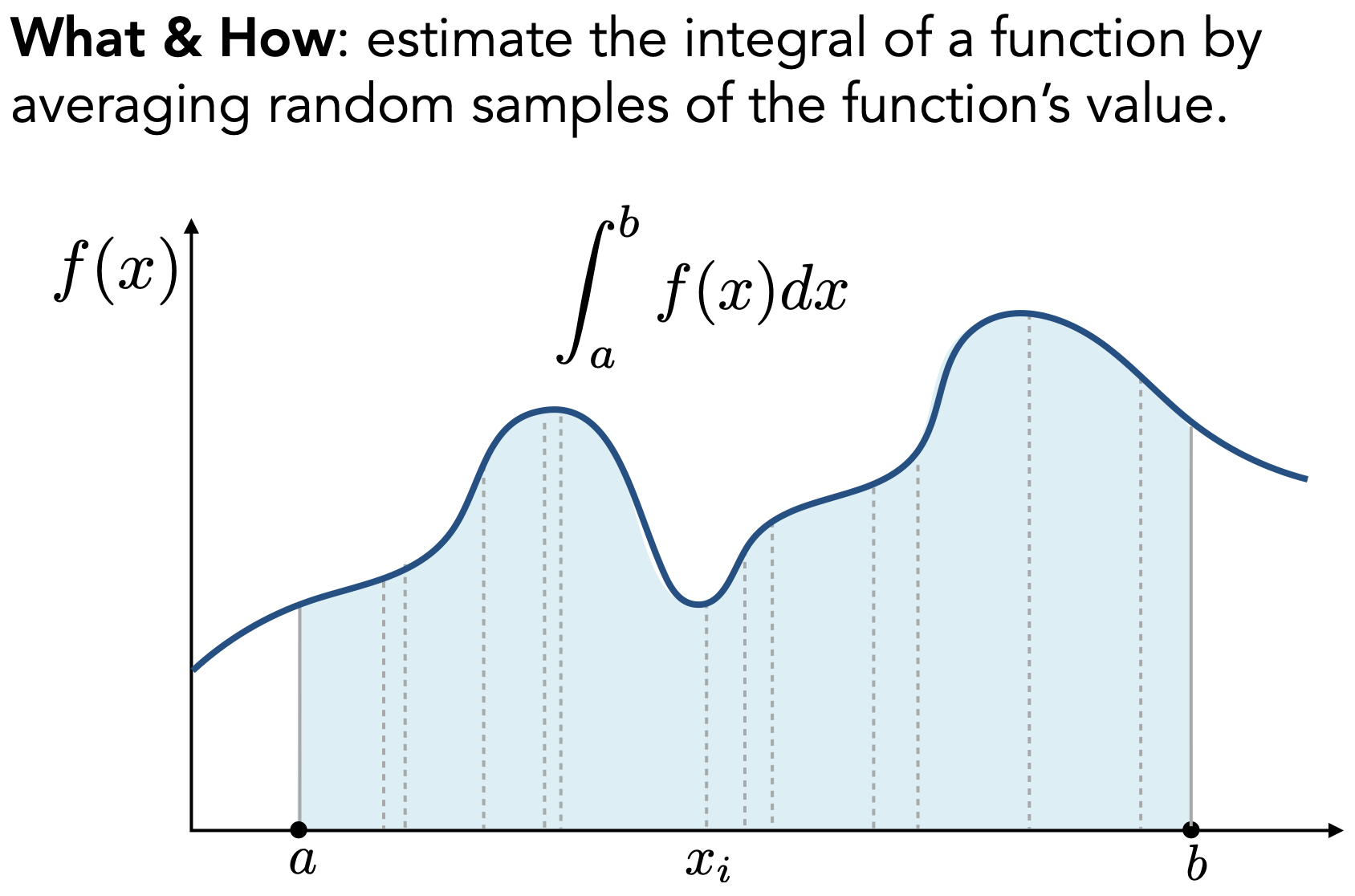
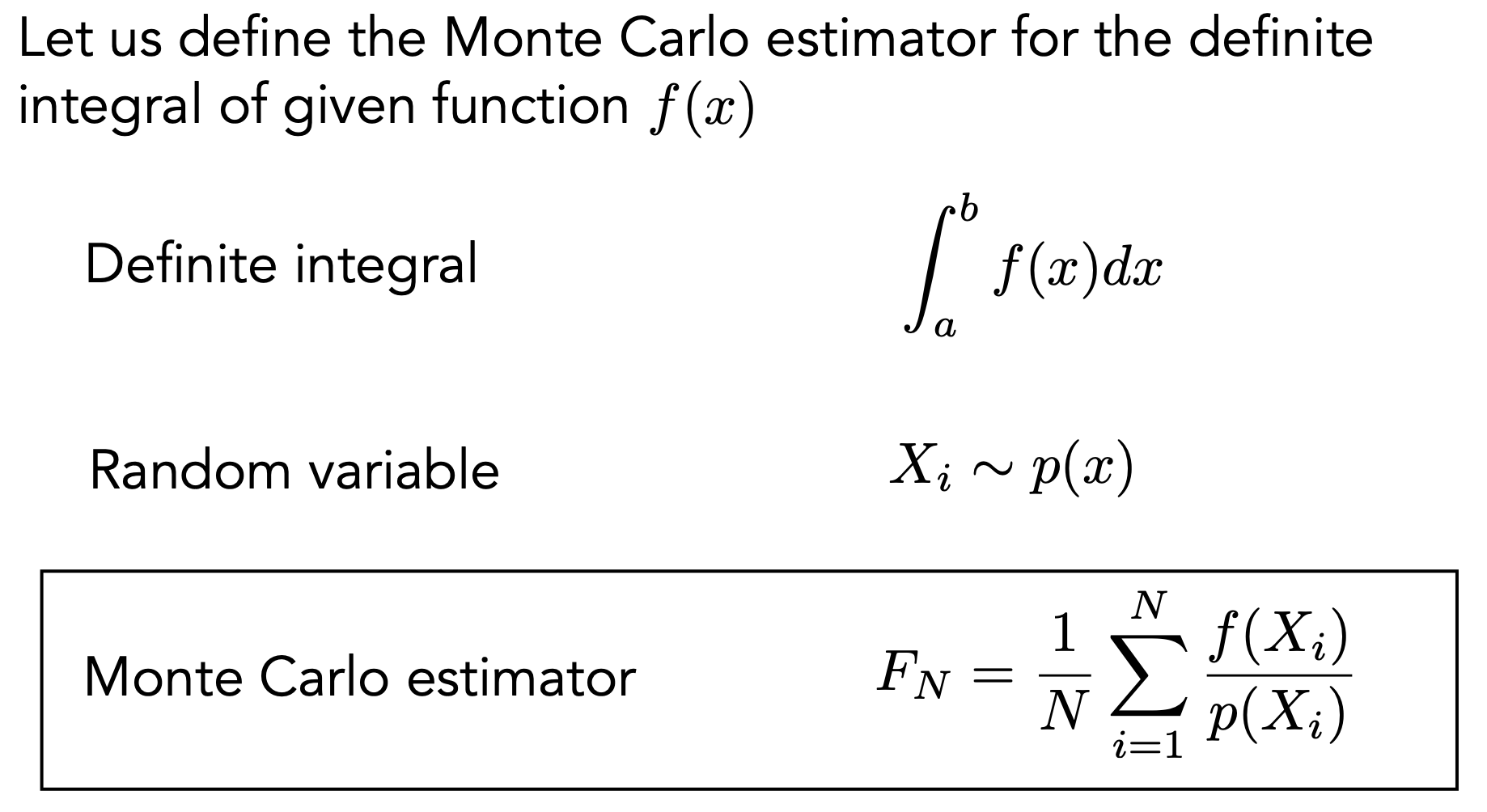
Monte Carlo Integration 蒙特卡洛积分
- 如何使用:在积分域内,对样本不断随机采样,做平均,近似函数积分数值
- 特例情况:均与采样(a~b间均匀采样,则采样PDF为常函数)
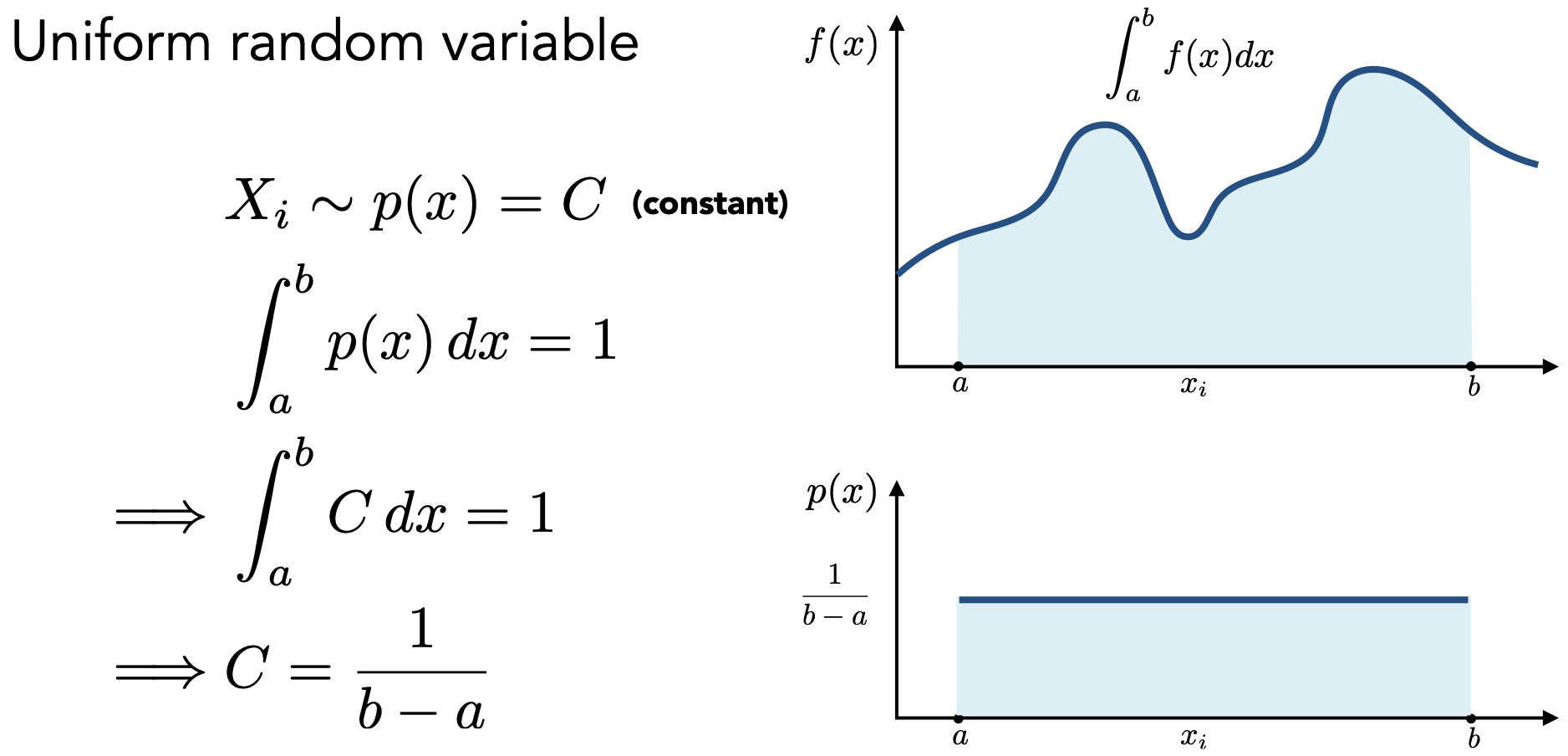
- 上图已求解出了 $p(x)$ ,带入 $F_N$
- 通用情况:非均匀采样(PDF不为常函数)

- 注意
- 样本越多,近似越准确
- 在 $x$ 积分,则对应在 $x$ 采样
- 除以 $p(X_i)$ 相当于为非均匀的采样加权(上述均匀采样权重相同,因此 $p(X_i)$ 就是常数)
Path Tracing 路径追踪
对比 Whitted-style ray tracing
- 回顾 Whitted-style ray tracing
- 始终执行镜面反射/折射
- 在漫反射表面上停止反射
- BUT!!! Whitted-style ray tracing is not totally based on physics, which needs to be improved!!!
- Problems of Whitted-style ray tracing
- 只可以镜面反射or折射——无法表现glossy reflection
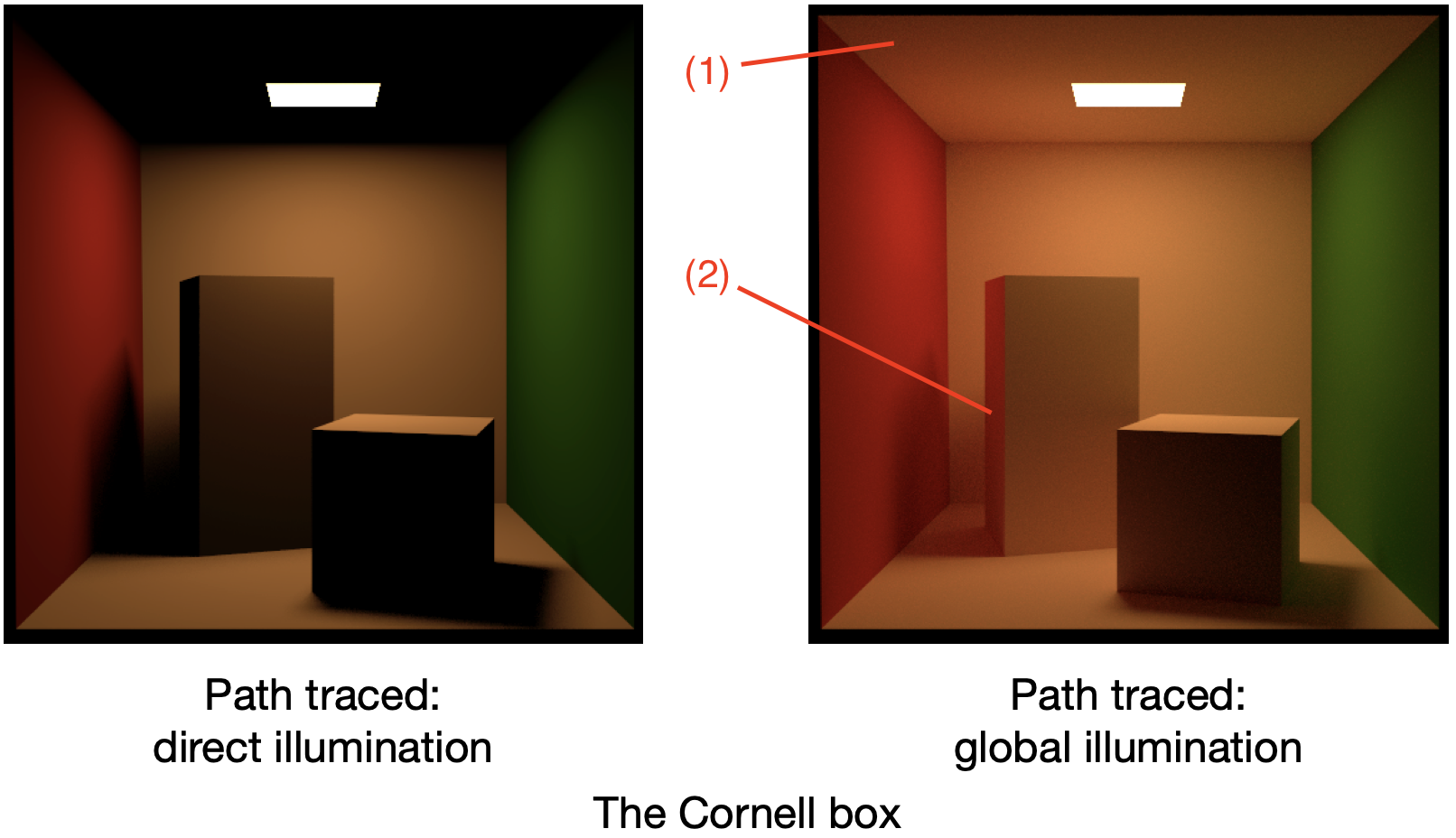
- 遇到漫反射物体,光线停止传播——忽略了漫反射物体间的光线传播(1);无法表现Color Bleeding(2)
- 只可以镜面反射or折射——无法表现glossy reflection
- But!!! The rendering equation is correct!!!
- 需要求出光照,则需求解渲染方程

- 需要解决
- STEP1: 半球域内的定积分——蒙特卡洛积分
- STEP2: 递归
- 需要求出光照,则需求解渲染方程

A Simple Monte Carlo Solution(to solve the rendering equation)
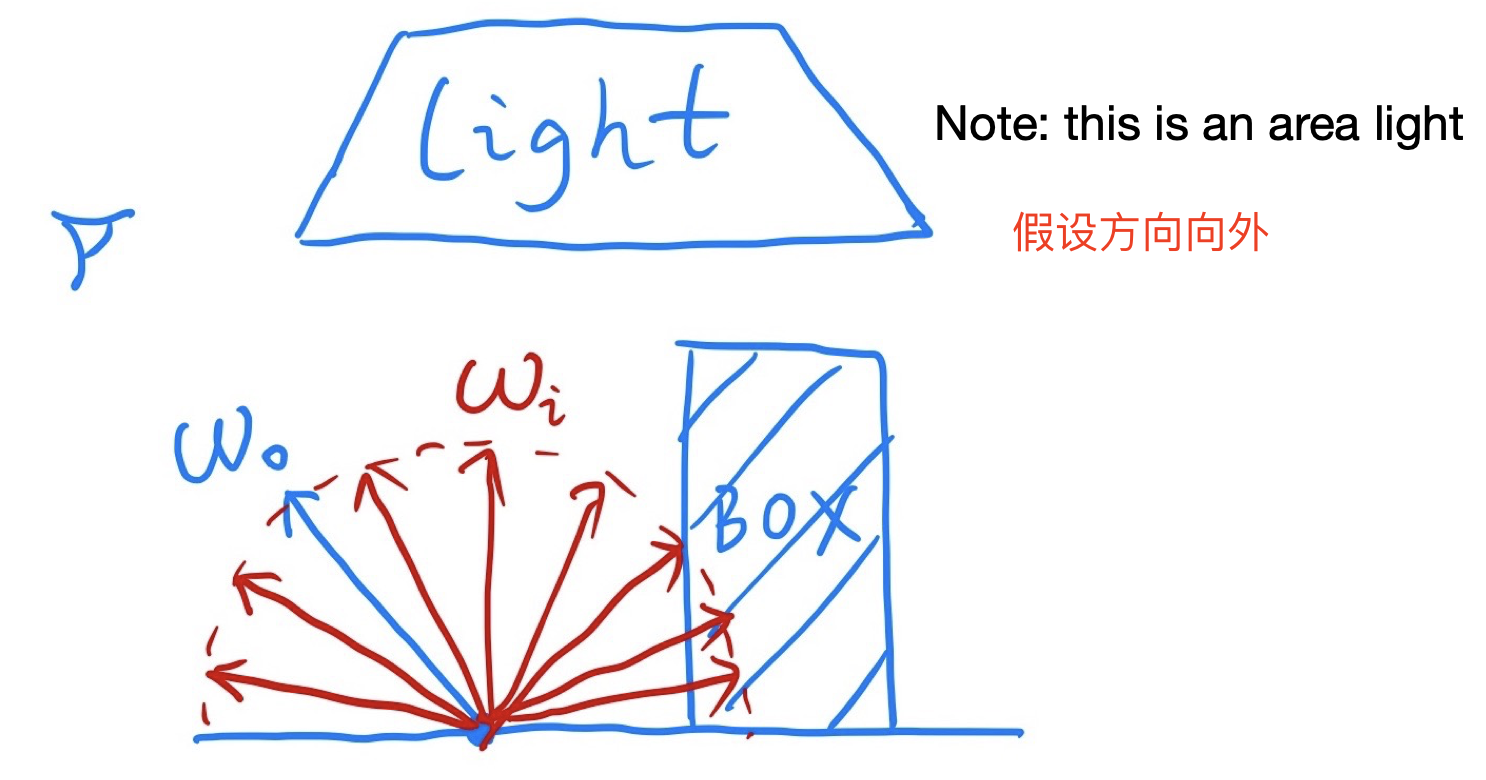
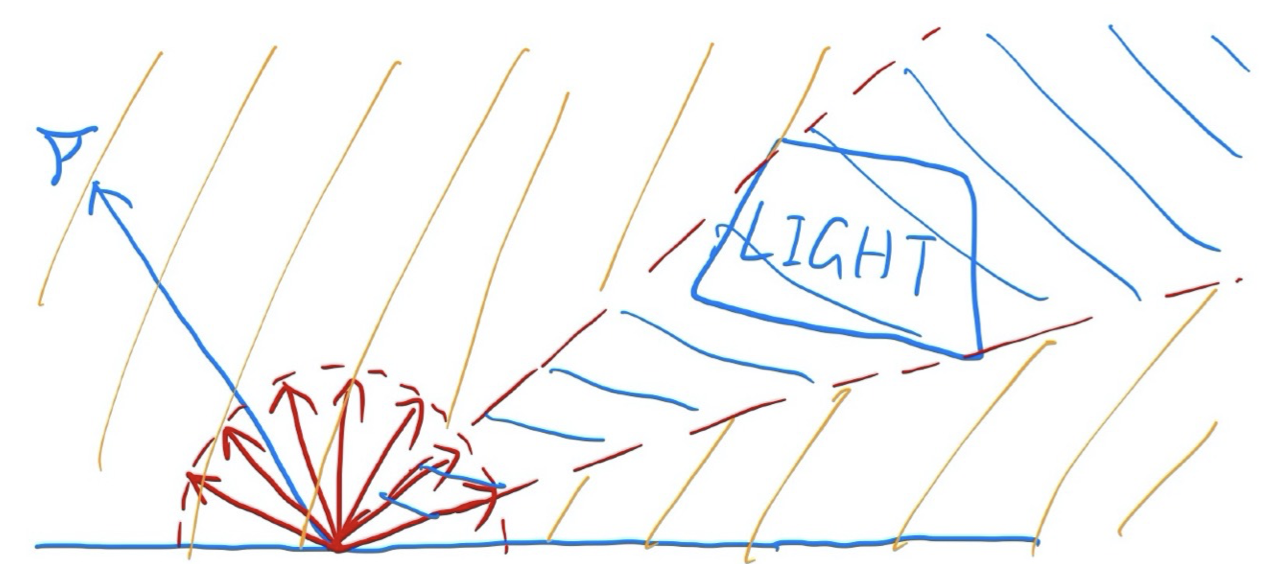
- 假设一种简单情况,即只渲染如图所示一个point的直接光照
- 直接光照条件下,$L_i$ 只可能来自光源
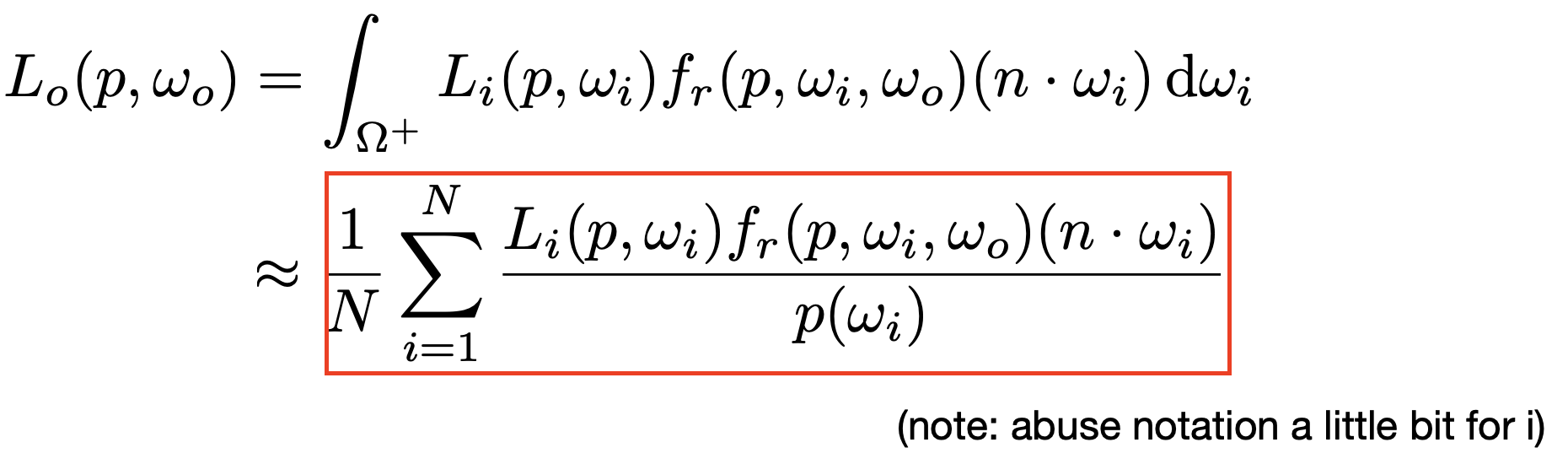
- 利用蒙特卡洛积分(暂且忽略渲染方程的自发光项)
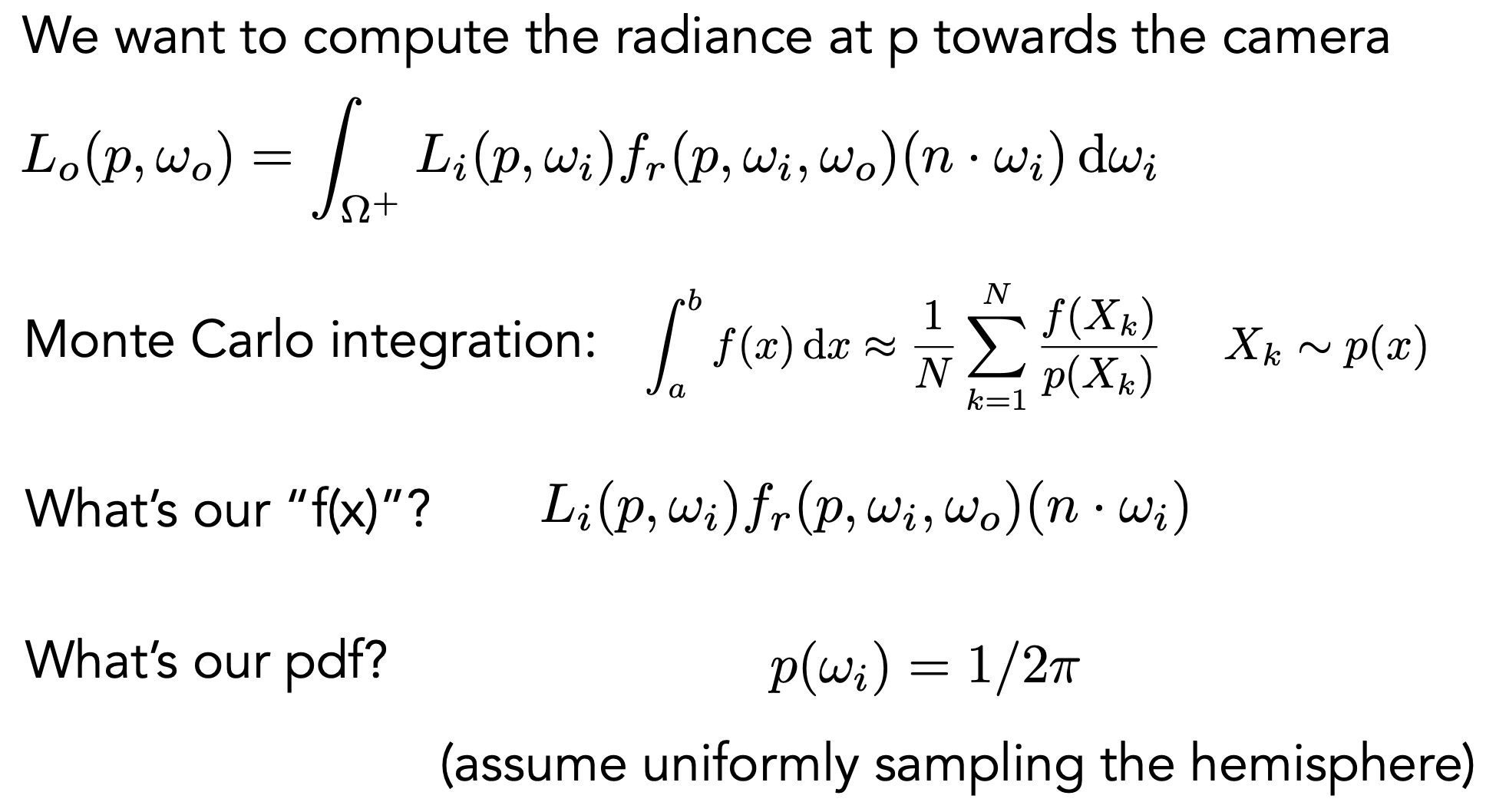
- $f(X_k)$ :积分内函数整体
- PDF:假设对半球进行平均的采样,则 $p(X_k)$ 为常数 $1/2\pi$
将渲染方程写成蒙特卡洛积分后形式
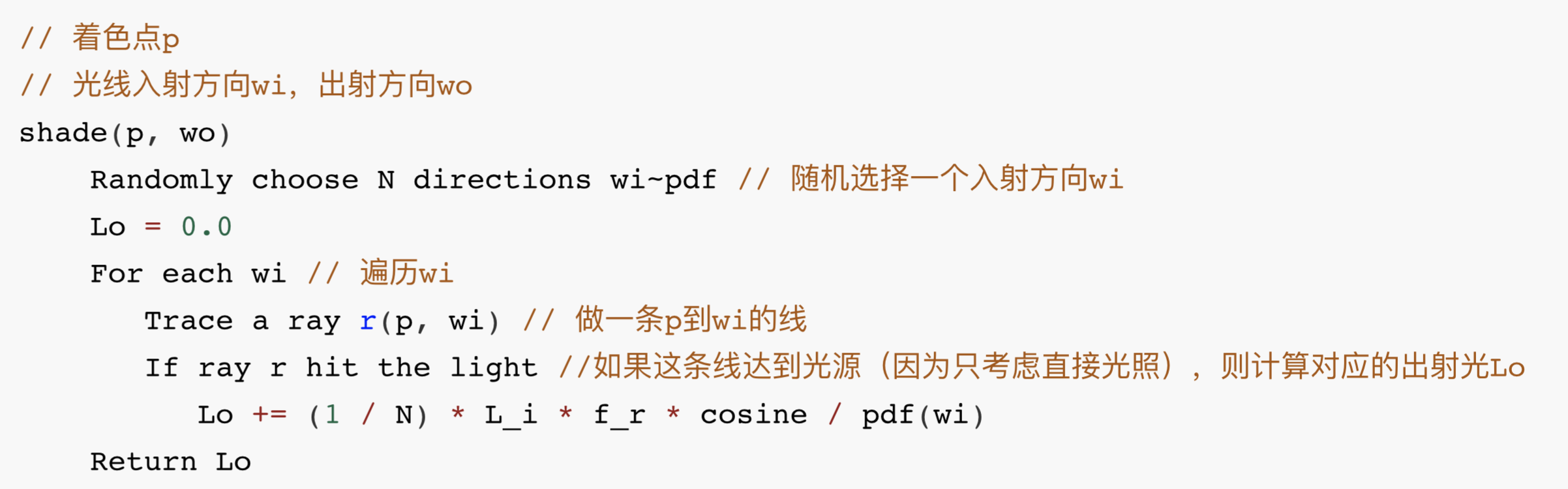
- 意义:得出一种正确的直接光照算法,可以算出着色点point出射的Radiance
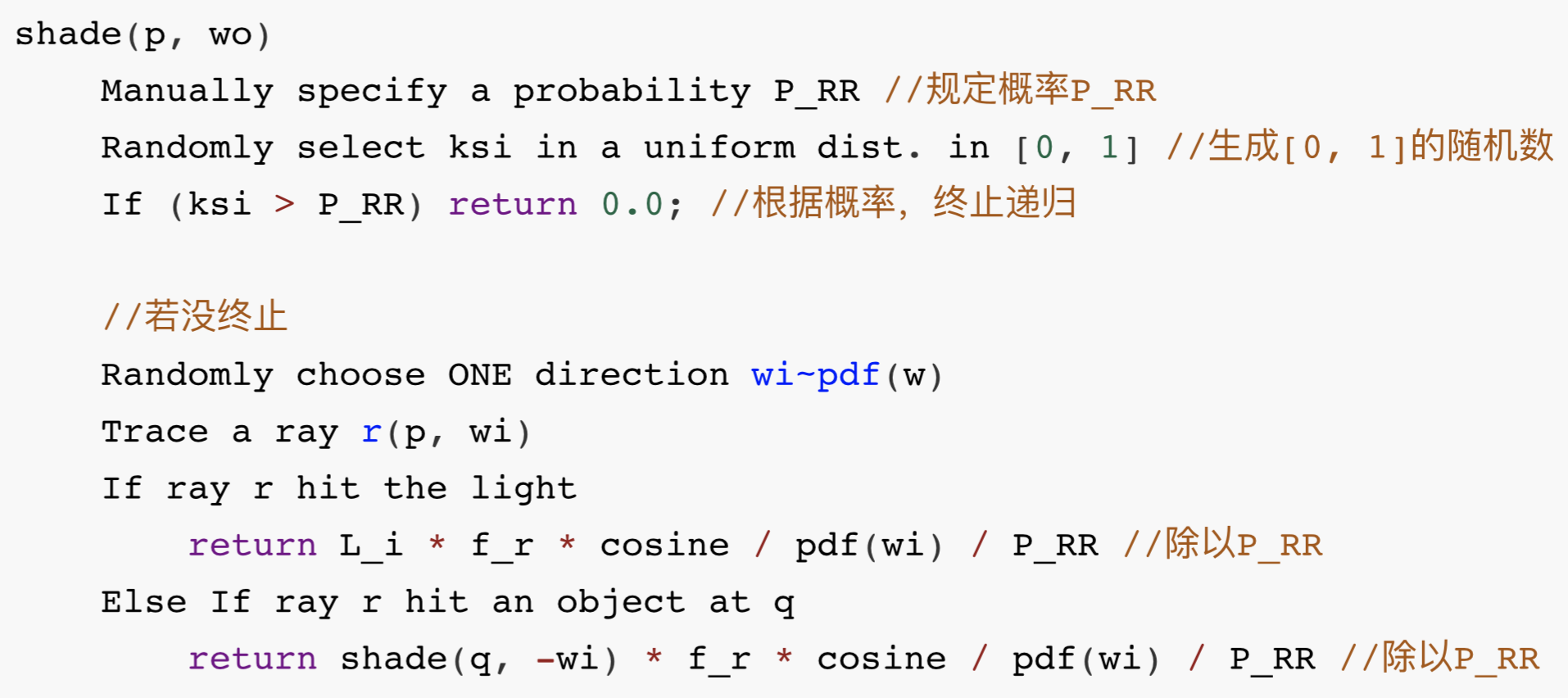
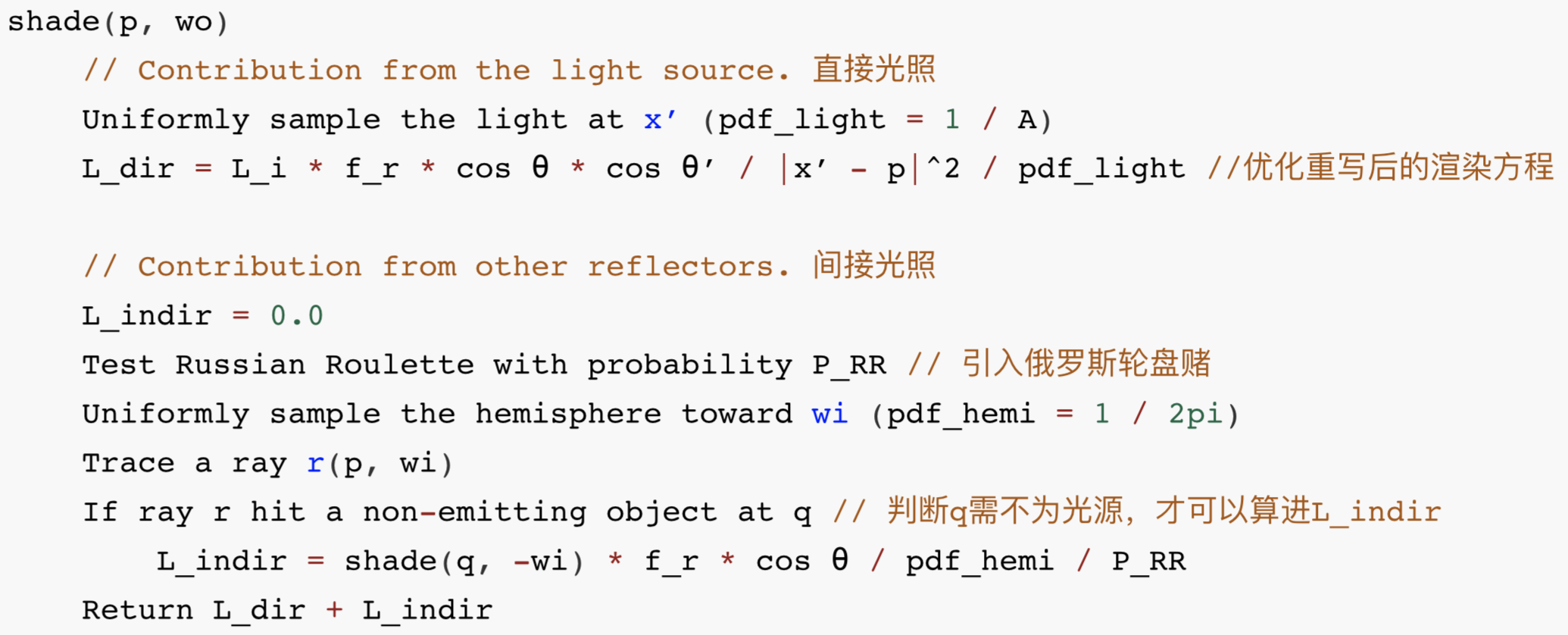
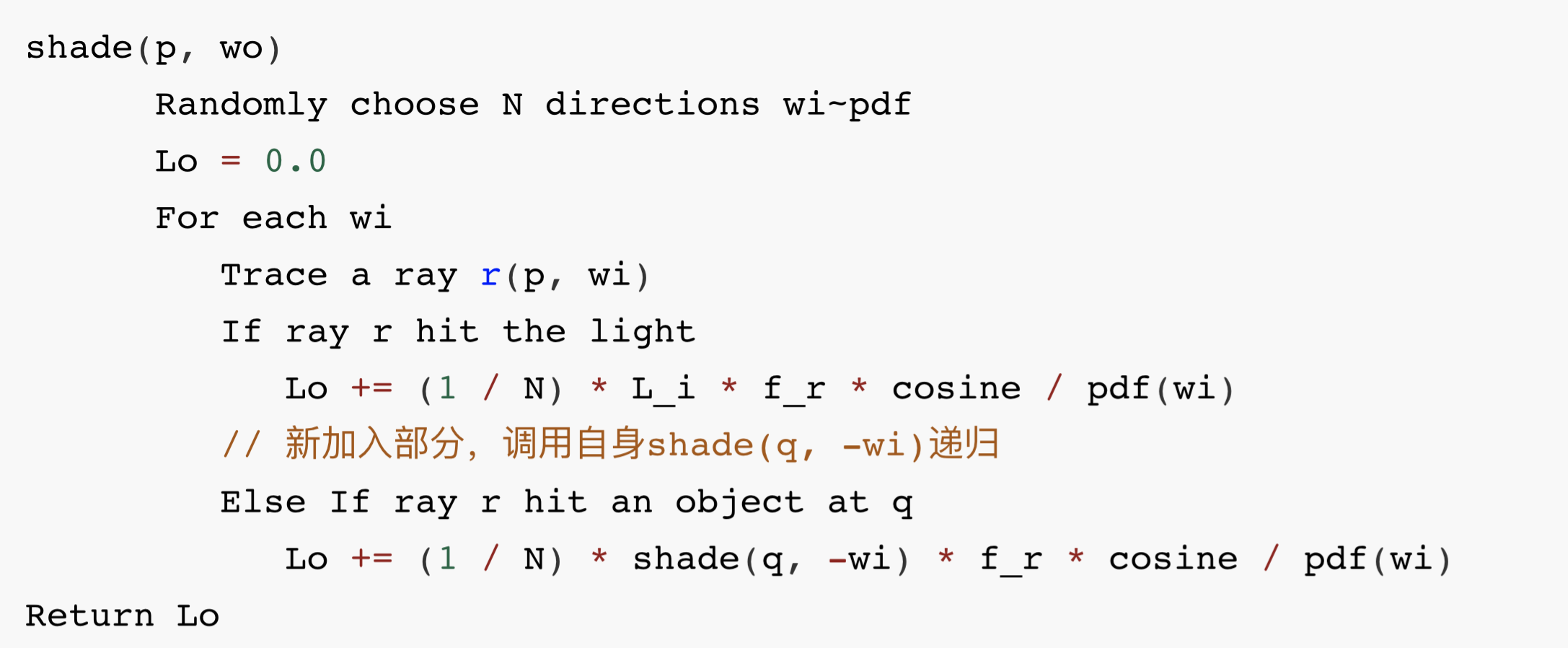
只考虑直接光照的,path tracing的,$shade(p,wo)$ 伪代码
Global Illumination (引入递归)
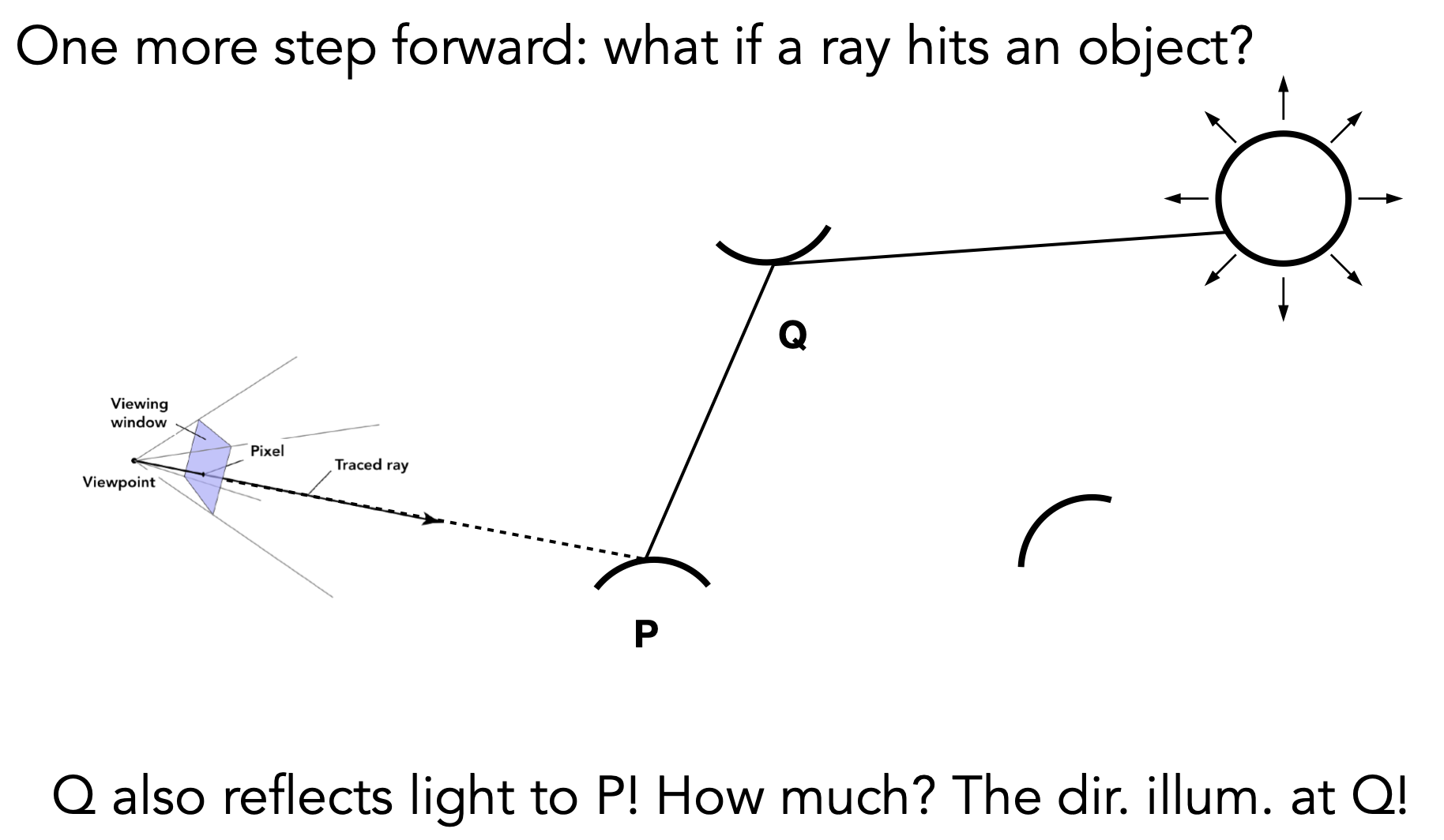
- $shade(p,wo)$ 伪代码
Problems & Solving Problems(Ray Generation & Russian Roulette)
上述解决方法的问题
- Problem1: Explosion of #rays as #bounces go up (N为反射打出的光线数)
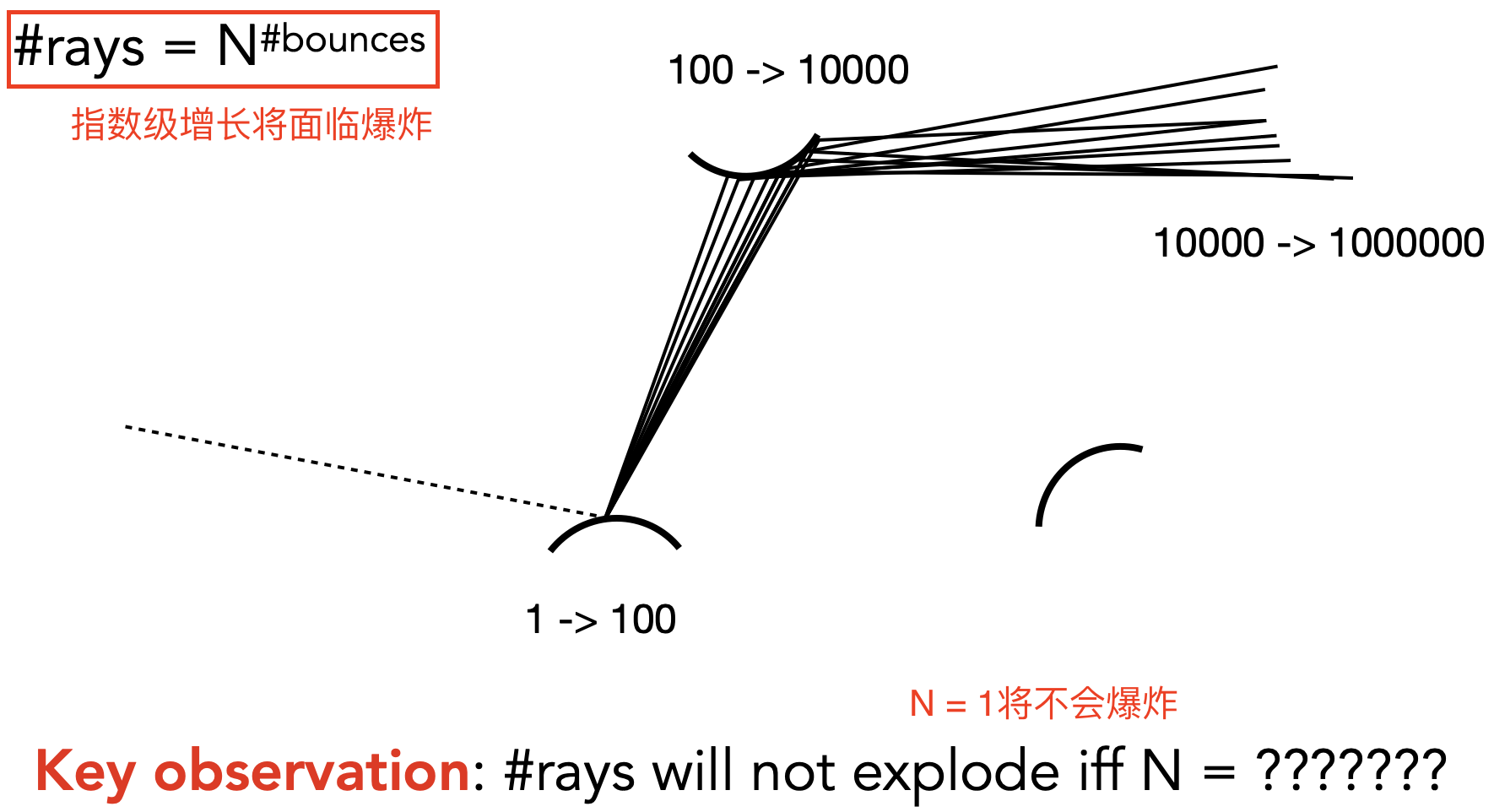
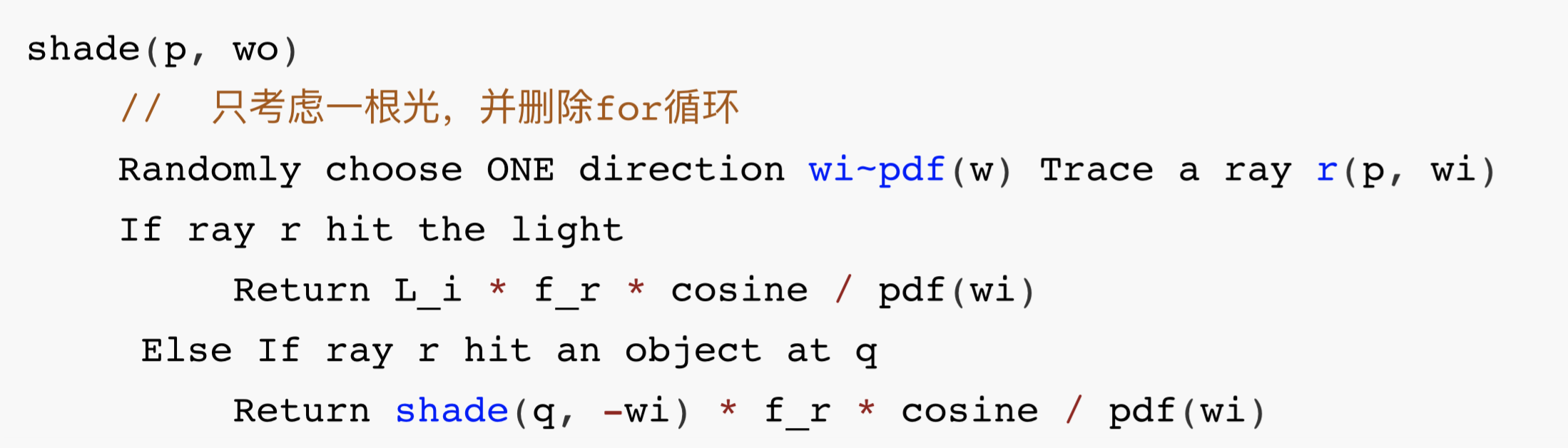
- 解决explosion的方法:N = 1(Path Tracing就是N=1时做蒙特卡洛积分)
- $shade(p,wo)$ 伪代码
- N = 1会引起Noise,不过可以对一个像素trace more paths并求平均进行解决
- Problem2: 递归无法停止
- 真实世界光线无限弹射
- 减少弹射次数 == 能量损失,因此不能强制终止
- 解决方法:引入Russian Roulette (RR)俄罗斯轮盘赌——一定的概率停止继续追踪
- Problem1: Explosion of #rays as #bounces go up (N为反射打出的光线数)
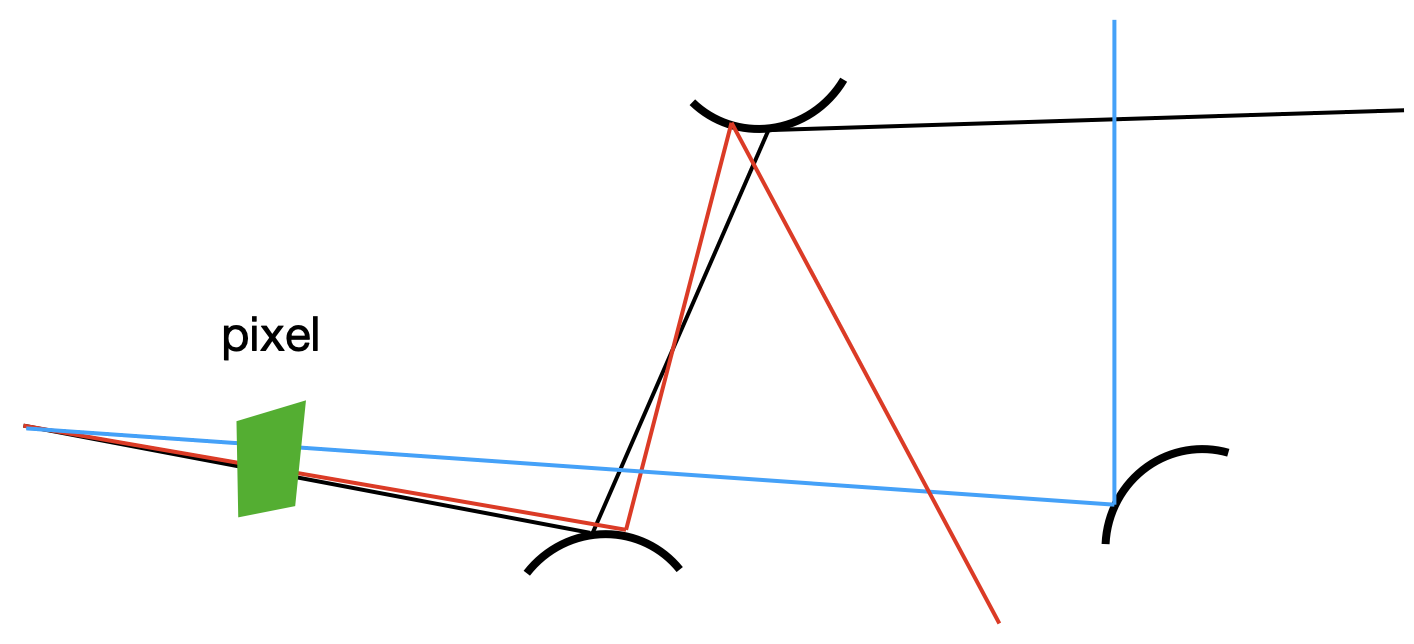
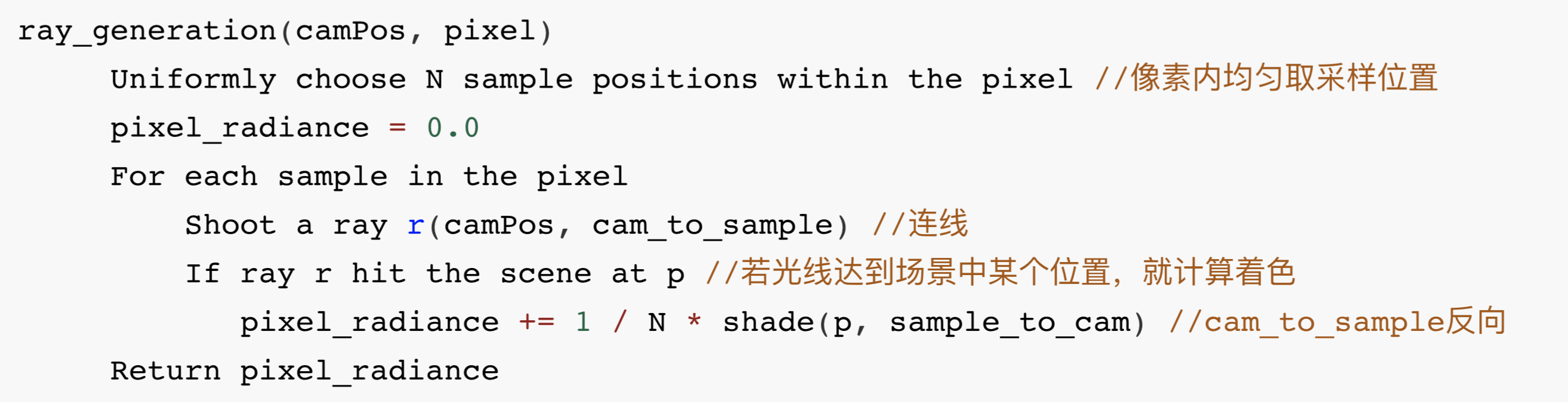
Ray Generation: 相机如何产生光线路径
- Russian Roulette (RR)俄罗斯轮盘赌
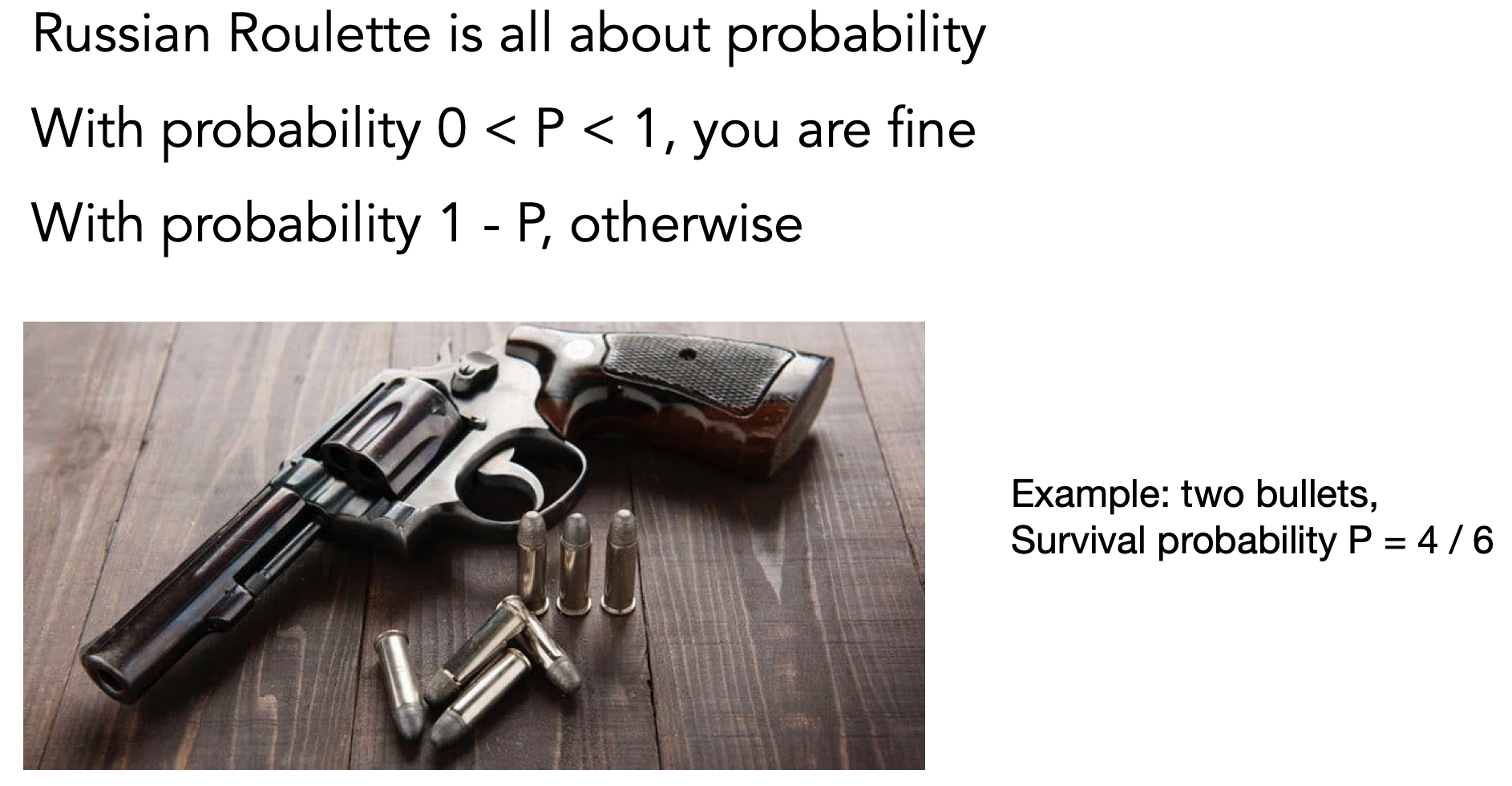
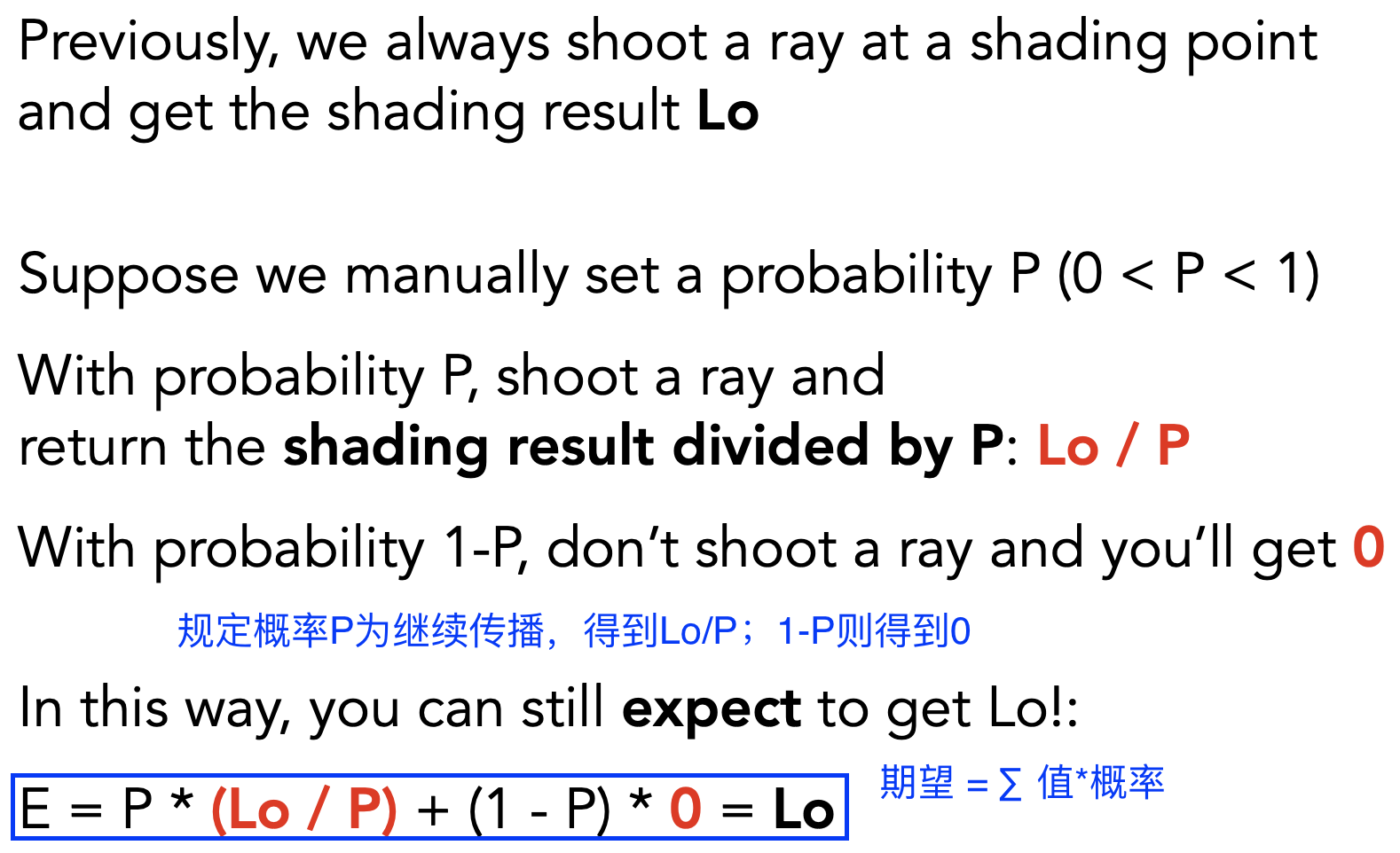
- 通过计算期望 $E$,最后虽然有Noise,但结果 $L_o$ 一定正确
- $shade(p,wo)$ 伪代码
Path Tracing 优化
SPP (samples per pixel)
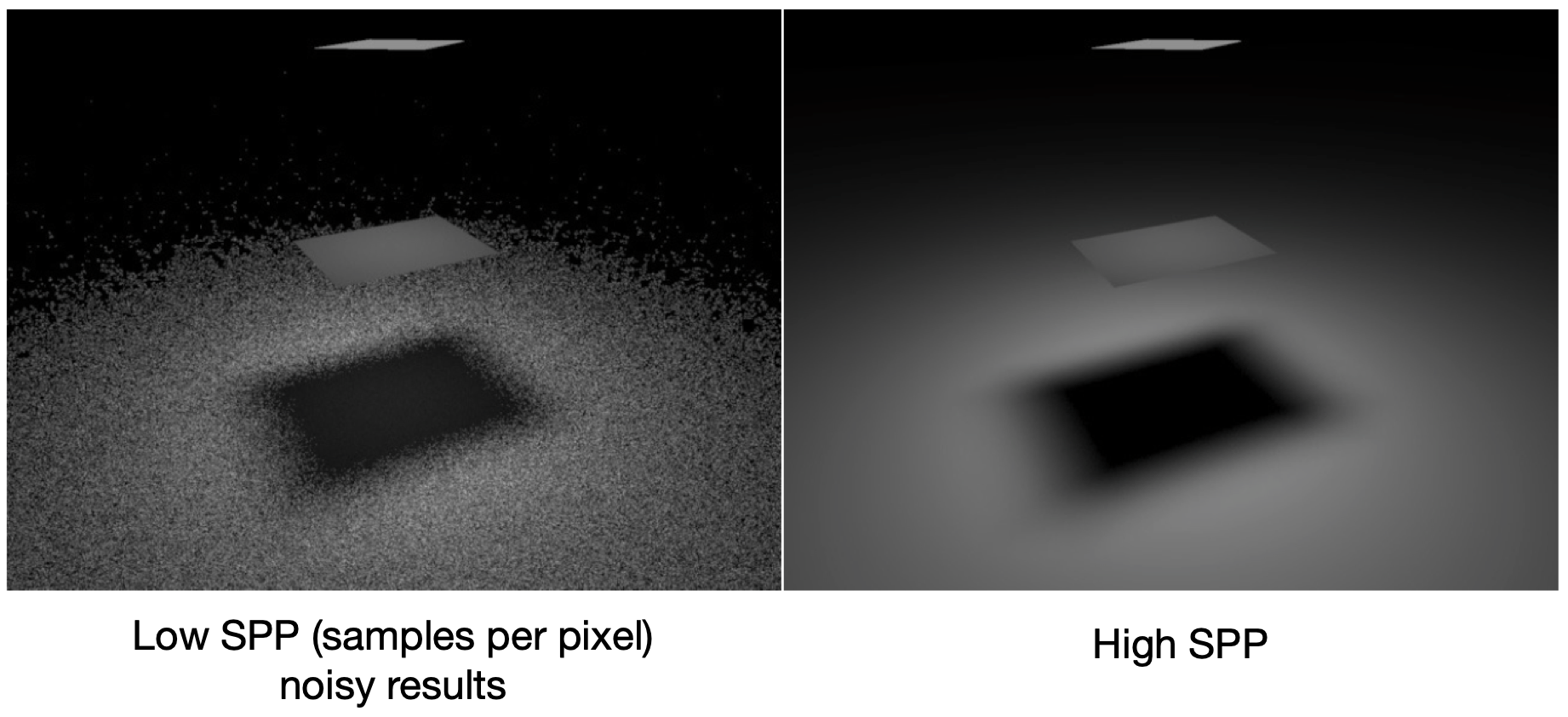
- 目的:提升Low SPP下效率
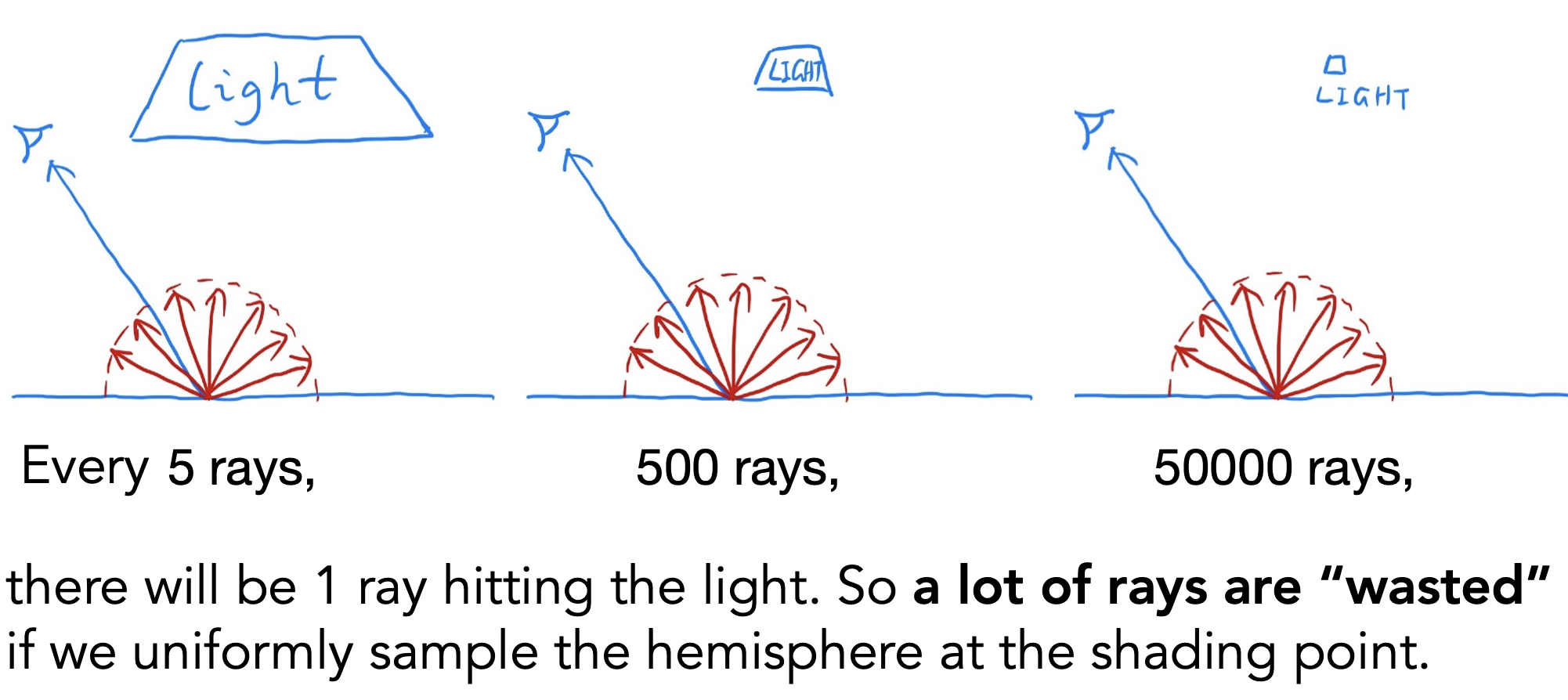
效率低的原因:光源小、PDF为常数(均匀采样)时,假设每50000根光线才有1根达到光源,许多光线被浪费
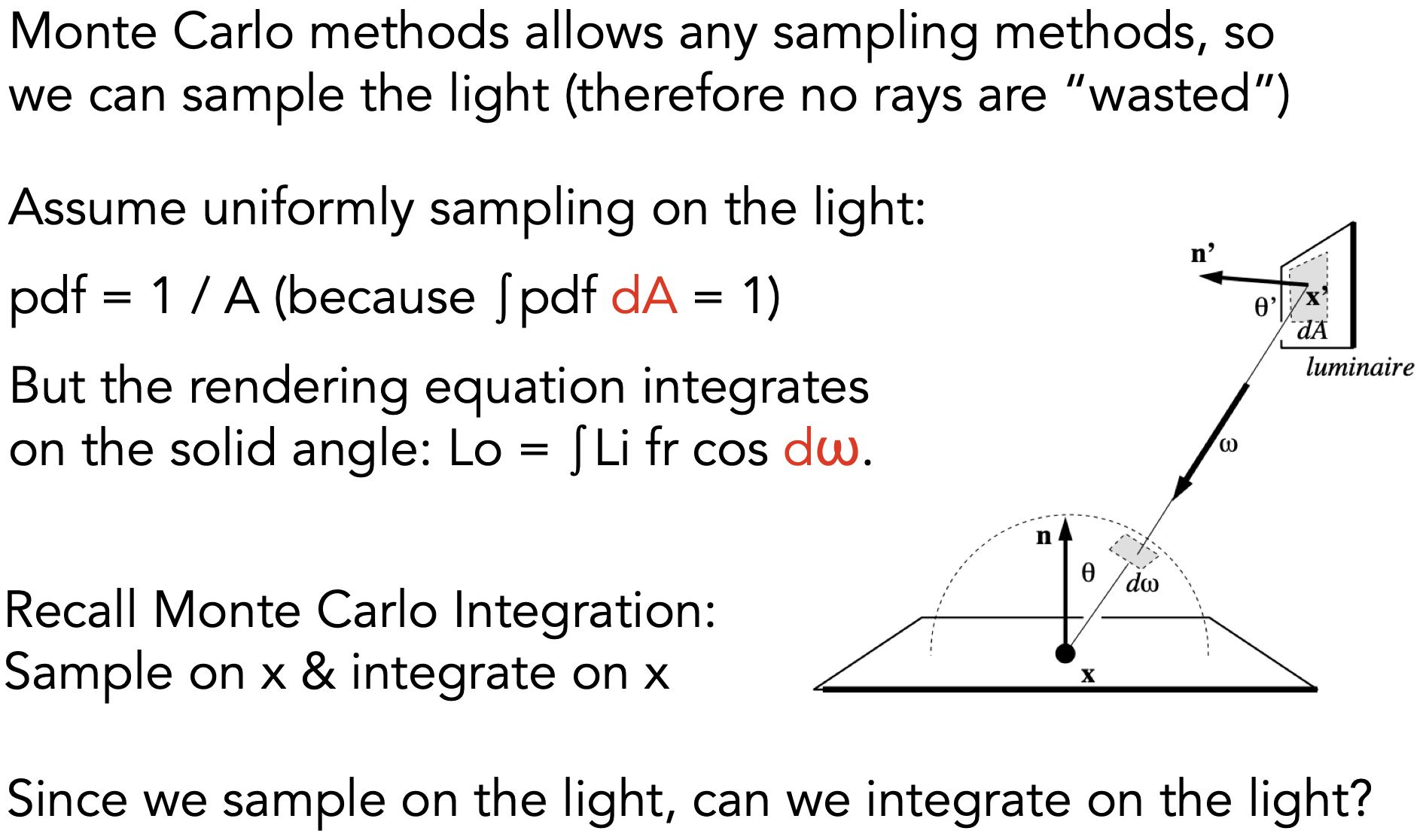
优化思路:Sampling the light(针对伪代码中“hit the light”的判断)
- 采样的光路全分布在光源表面;对渲染方程的积分换元(改变积分域),从 $d\omega$ 换成光源面积 $dA$,PDF = 1/A
- 注⚠️:该方法不好算点光源,建议将点光源换成小面光
- 找到 $d\omega$ 和 $dA$ 的关系,并重写渲染方程
进一步改进 $shade(p, wo)$ 伪代码
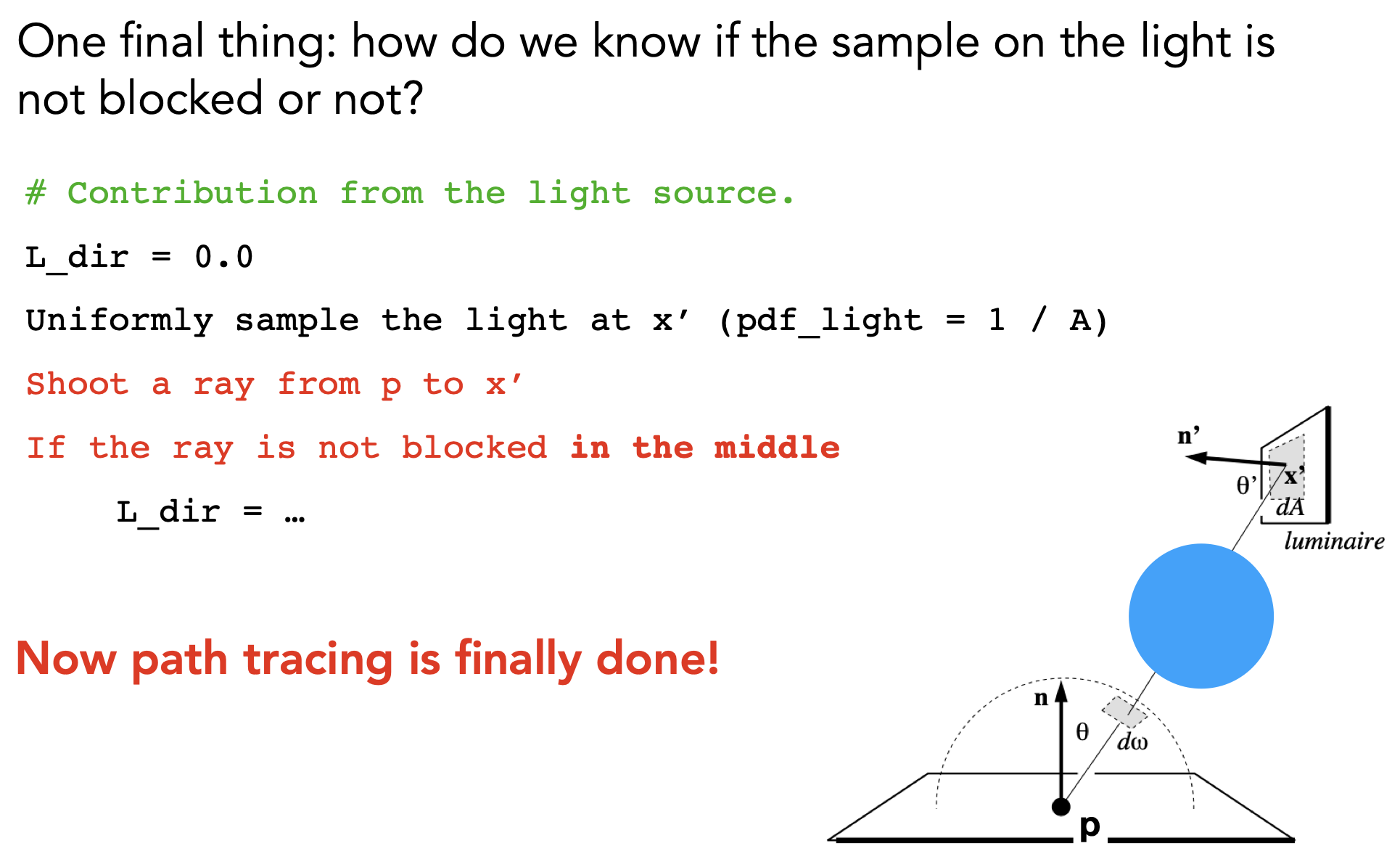
将光源分成直接光照 & 间接光照,分开计算(此处未考虑遮挡)
- light source (direct直接光照, no need to have RR)
- other reflectors (indirect间接光照, RR)
shade(p, wo) // Contribution from the light source. 直接光照 Uniformly sample the light at x’ (pdf_light = 1 / A) L_dir = L_i * f_r * cos θ * cos θ’ / |x’ - p|^2 / pdf_light //优化重写后的渲染方程 // Contribution from other reflectors. 间接光照 L_indir = 0.0 Test Russian Roulette with probability P_RR // 引入俄罗斯轮盘赌 Uniformly sample the hemisphere toward wi (pdf_hemi = 1 / 2pi) Trace a ray r(p, wi) If ray r hit a non-emitting object at q // 判断q需不为光源,才可以算进L_indir L_indir = shade(q, -wi) * f_r * cos θ / pdf_hemi / P_RR Return L_dir + L_indir若光源到 $p$ 有遮挡:作出 $x’$ 到 $p$ 线,判断直接光照有无遮挡
PATH TRACING is AWESOME
- PT vs. Photo
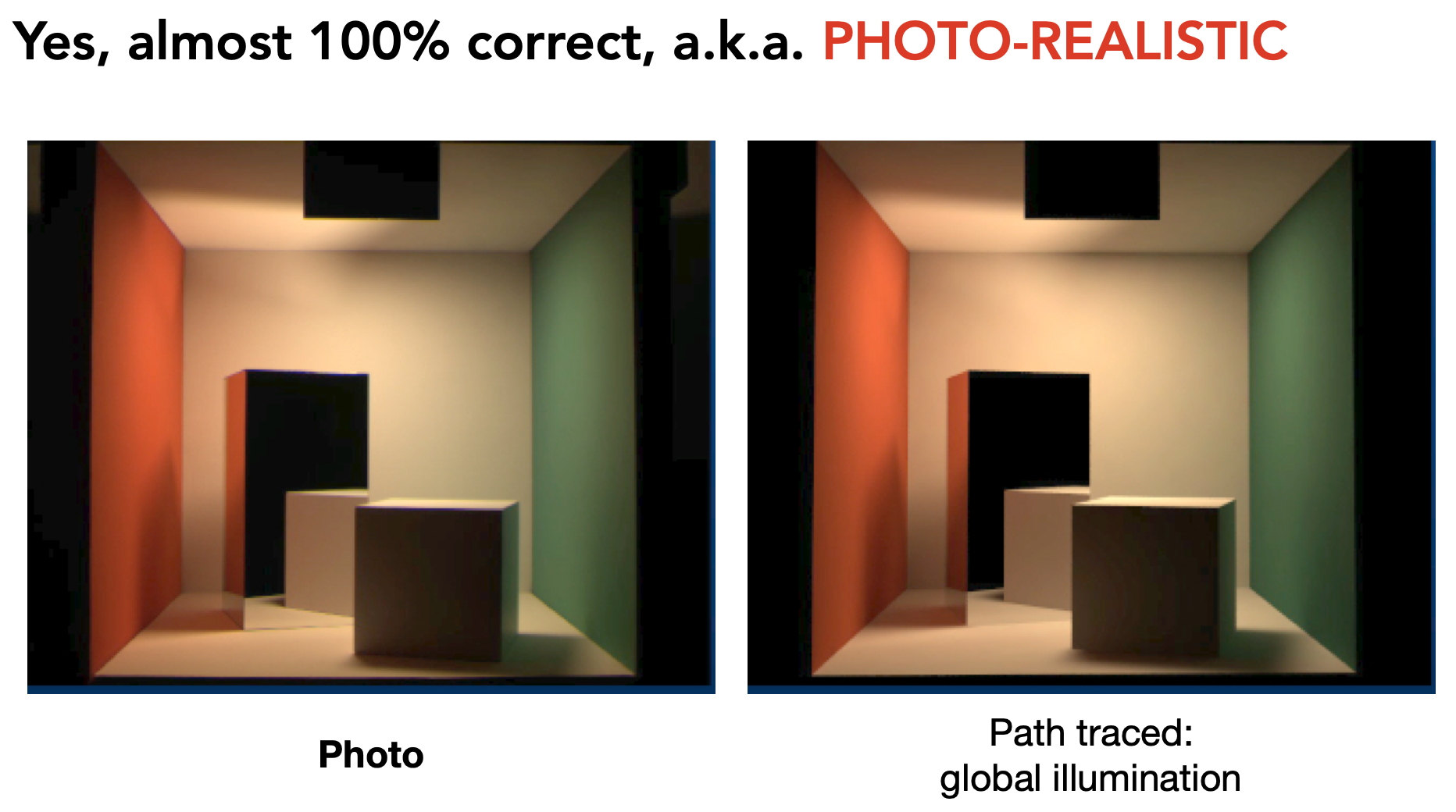
- The Cornell box — http://www.graphics.cornell.edu/online/box/compare.html
- PT vs. Photo
Further